
Дисплей дополненной реальности мгновенно предупредит водителя об опасных участках
Каждый день в ДТП из-за человеческих ошибок погибают около 16 тыс. участников дорожного движения. Видимо, цифра в публикации на портале Techxplore.com относится ко всему человечеству, так как в год, таким образом, получается более 5,8 млн смертей.
Отображение информации с полным круговым охватом, на 360 градусов, может предупреждать водителей о дорожных препятствиях в текущем моменте. Европейские исследователи разработали обзорный дисплей дополненной реальности, который повысит безопасность езды. Это возможно благодаря показу вероятных угроз в виде трёхмерных голограмм высокого разрешения непосредственно в поле зрения водителя здесь и сейчас.
Современные системы обзорного отображения ограничены двумерными проекциями на лобовое стекло автомобиля. Но исследователи из Университетов Кембриджа, Оксфорда и Университетского колледжа Лондона (UCL) продемонстрировали визуальную систему безопасности, которая состоит из трёхмерного лазерного сканера и лидара (лазерного локатора), чтобы создавать 3D-изображения улиц.
Система умеет «видеть» сквозь объекты, проецируя голографические изображения скрытых от водителя дорожных препятствий в виде пропорциональной и по масштабам, и по удалённости картинки. Так, дорожный знак, который «прячется» за фурой, водитель увидит на голограмме заблаговременно. Технология 3D-голографической проекции позволяет человеку за рулём сосредоточиться на трассе, а не на лобовом стекле. Утверждается, что изобретение просто должно повысить безопасность на дорогах. Описан научный проект в журнале Advanced Optical Materials («Передовые оптические материалы»).
Первый автор технологической разработки — Яна Скирневская из инженерного факультета Кембриджа. Она пояснила, что основной принцип подхода — направлять взгляд водителя вверх. В противном случае доли секунды, если водитель отвлечётся, достаточно для дорожного инцидента. Однако проекция всего лишь двумерных изображений на небольшую часть лобового стекла даёт водителю шанс концентрироваться на таких картинках, а не на дороге.
На протяжении нескольких лет Скирневская с коллегами трудились над разработкой альтернатив привычным обзорным дисплеям. Идея была в том, чтобы повысить безопасность дорожного движения, показывая более точную информацию, и чтобы при этом человек за рулём не отводил глаз от трассы перед автомобилем.
Скирневская рассказала, что их коллектив решил проецировать картинки-предупреждения на лобовое стекло, но так, чтобы не отвлекать водителя. А для этого — не показывать ничего, что напрямую не относится к вождению.
Учёные придумали способ видеопроекции с голографическим облаком точек для пропорциональной демонстрации дополненной реальности об объектах на пути. Система сочетает данные голографической установки и лидара, который оперирует оптическими волнами для оценки дальности до предметов. Лидар измеряет отражённые импульсы лазера, чтобы вычислить, насколько далеко «увиденное» от источника света.
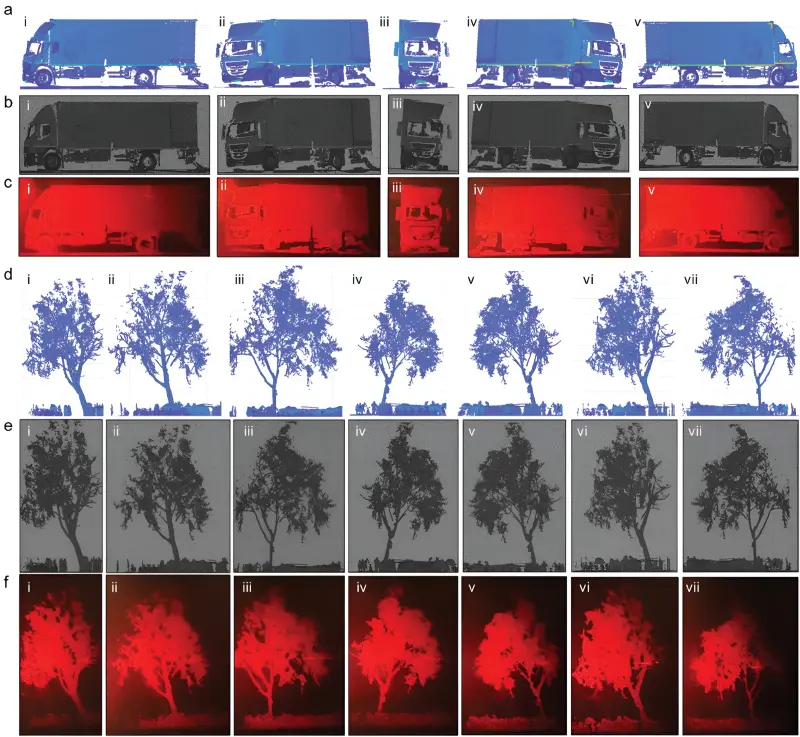
Исследователи протестировали систему, отсканировав улицу Малет в кампусе UCL в центре Лондона. Информация из облака точек лидара преобразовывается в многослойные 3D-голограммы плотностью по 400 тыс. таких световых точек на основе реальных данных. Затем, путём обработки данных, изобретатели пришли к концепции проецирования предстоящих дорожных препятствий в формате 360 градусов — это давало чёткую видимость объёма (глубины) каждого объекта.
Исследователи ускорили процесс сканирования, и голограммы генерировались и отображались незамедлительно. Важно, что при сканировании местности водитель получает динамическую (постоянно обновляющуюся) информацию, ведь оживлённые городские улицы меняются очень часто.
Исследователи рассказали, что собранными ими данными можно поделиться и сохранить их в облаке. Это значит, что любой водитель, проезжая по зафиксированному лидарами маршруту, может получить к ним доступ. Таким образом, речь идёт о более совершенном варианте тех навигаторов, которые уже стали обыденностью.
— Яна Скирневская, ведущий автор технологической разработки.
Исследователи пояснили, что главное преимущество системы предупреждения заключается даже не в сборе дополнительных данных, хотя это тоже повышает точность. Уникальность изобретения — в обзоре на 360° за счёт оптимального выбора данных из отдельных лазерных слепков конкретных объектов, например, грузовиков или зданий, и это позволяет оценивать дорожные опасности в комплексе, наиболее полно.
Скирневская объяснила, что при возможности сканировать до 400 тыс. точек каждого объекта пришлось придумать, как фильтровать главное, чтобы сканирование, извлечение и проекция данных не замедляли процесс. Так учёные поняли, что достаточно всего 100 точек лазерных данных, чтобы идентифицировать объект и определить его величину. Водителю нужно видеть ровно столько, чтобы верно оценивать окружающее, и не более.
Ранее в 2023 году Скирневская с коллегами устроили в Музее науки в британской столицы цифровую презентацию достижения через гарнитуры виртуальной реальности. Затем, по отзывам первых пользователей, они «допилили» свою систему, снизив нагрузку на глаза, а также учли настройки для людей с нарушениями зрения.
Теперь исследователи сотрудничают с Google над подготовкой технологии к тестированию на настоящем автотранспорте. Систему хотят опробовать и на трассах общего пользования, и на частных дорогах уже в 2024 году.
Отображение информации с полным круговым охватом, на 360 градусов, может предупреждать водителей о дорожных препятствиях в текущем моменте. Европейские исследователи разработали обзорный дисплей дополненной реальности, который повысит безопасность езды. Это возможно благодаря показу вероятных угроз в виде трёхмерных голограмм высокого разрешения непосредственно в поле зрения водителя здесь и сейчас.
Современные системы обзорного отображения ограничены двумерными проекциями на лобовое стекло автомобиля. Но исследователи из Университетов Кембриджа, Оксфорда и Университетского колледжа Лондона (UCL) продемонстрировали визуальную систему безопасности, которая состоит из трёхмерного лазерного сканера и лидара (лазерного локатора), чтобы создавать 3D-изображения улиц.
Система умеет «видеть» сквозь объекты, проецируя голографические изображения скрытых от водителя дорожных препятствий в виде пропорциональной и по масштабам, и по удалённости картинки. Так, дорожный знак, который «прячется» за фурой, водитель увидит на голограмме заблаговременно. Технология 3D-голографической проекции позволяет человеку за рулём сосредоточиться на трассе, а не на лобовом стекле. Утверждается, что изобретение просто должно повысить безопасность на дорогах. Описан научный проект в журнале Advanced Optical Materials («Передовые оптические материалы»).
Первый автор технологической разработки — Яна Скирневская из инженерного факультета Кембриджа. Она пояснила, что основной принцип подхода — направлять взгляд водителя вверх. В противном случае доли секунды, если водитель отвлечётся, достаточно для дорожного инцидента. Однако проекция всего лишь двумерных изображений на небольшую часть лобового стекла даёт водителю шанс концентрироваться на таких картинках, а не на дороге.
На протяжении нескольких лет Скирневская с коллегами трудились над разработкой альтернатив привычным обзорным дисплеям. Идея была в том, чтобы повысить безопасность дорожного движения, показывая более точную информацию, и чтобы при этом человек за рулём не отводил глаз от трассы перед автомобилем.
Скирневская рассказала, что их коллектив решил проецировать картинки-предупреждения на лобовое стекло, но так, чтобы не отвлекать водителя. А для этого — не показывать ничего, что напрямую не относится к вождению.
Учёные придумали способ видеопроекции с голографическим облаком точек для пропорциональной демонстрации дополненной реальности об объектах на пути. Система сочетает данные голографической установки и лидара, который оперирует оптическими волнами для оценки дальности до предметов. Лидар измеряет отражённые импульсы лазера, чтобы вычислить, насколько далеко «увиденное» от источника света.
Исследователи протестировали систему, отсканировав улицу Малет в кампусе UCL в центре Лондона. Информация из облака точек лидара преобразовывается в многослойные 3D-голограммы плотностью по 400 тыс. таких световых точек на основе реальных данных. Затем, путём обработки данных, изобретатели пришли к концепции проецирования предстоящих дорожных препятствий в формате 360 градусов — это давало чёткую видимость объёма (глубины) каждого объекта.
Исследователи ускорили процесс сканирования, и голограммы генерировались и отображались незамедлительно. Важно, что при сканировании местности водитель получает динамическую (постоянно обновляющуюся) информацию, ведь оживлённые городские улицы меняются очень часто.
Исследователи рассказали, что собранными ими данными можно поделиться и сохранить их в облаке. Это значит, что любой водитель, проезжая по зафиксированному лидарами маршруту, может получить к ним доступ. Таким образом, речь идёт о более совершенном варианте тех навигаторов, которые уже стали обыденностью.
Таким образом, система является динамичной и может адаптироваться к изменяющимся условиям, фиксируя опасности или препятствия
— Яна Скирневская, ведущий автор технологической разработки.
Исследователи пояснили, что главное преимущество системы предупреждения заключается даже не в сборе дополнительных данных, хотя это тоже повышает точность. Уникальность изобретения — в обзоре на 360° за счёт оптимального выбора данных из отдельных лазерных слепков конкретных объектов, например, грузовиков или зданий, и это позволяет оценивать дорожные опасности в комплексе, наиболее полно.
Скирневская объяснила, что при возможности сканировать до 400 тыс. точек каждого объекта пришлось придумать, как фильтровать главное, чтобы сканирование, извлечение и проекция данных не замедляли процесс. Так учёные поняли, что достаточно всего 100 точек лазерных данных, чтобы идентифицировать объект и определить его величину. Водителю нужно видеть ровно столько, чтобы верно оценивать окружающее, и не более.
Ранее в 2023 году Скирневская с коллегами устроили в Музее науки в британской столицы цифровую презентацию достижения через гарнитуры виртуальной реальности. Затем, по отзывам первых пользователей, они «допилили» свою систему, снизив нагрузку на глаза, а также учли настройки для людей с нарушениями зрения.
Теперь исследователи сотрудничают с Google над подготовкой технологии к тестированию на настоящем автотранспорте. Систему хотят опробовать и на трассах общего пользования, и на частных дорогах уже в 2024 году.
- Дмитрий Ладыгин
- youtu.be/kD_xTj74IB4; onlinelibrary.wiley.com
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Искали золото в Австралии, а обнаружили следы взрыва тысяч атомных бомб
Почему находка древней катастрофы сильно продвинуло исследование Марса?...

Непотушенный окурок взорвал целый город: чудовищная катастрофа и чудовищная ложь в США
Почему власти десятилетиями умалчивали истинную причину самого мощного техногенного ЧП в истории Штатов?...

Секреты «русского гена»: о чем молчит гаплогруппа R1a1?
67 общих маркеров ДНК: половина современных русских мужчин и две трети мужчин из высших каст Северной Индии происходят от одного предка. И не только......

Если высохнет Каспий: почему это особенно опасно для России?
Прогнозы пугают: уникальное море-озеро может уменьшиться почти на 40%. И это катастрофа...

«Код» таинственной золотой подводной сферы наконец-то взломан спустя три года
Ученые говорят: это был настоящий ДНК-детектив. Внеземная «капсула» оказалась «деталью» морского гиганта...

Гениально, многоэтажно и смертельно опасно: как римляне научились строить высотные дома
Почему реальный Древний Рим выглядел вообще не так, как нам показывают в исторических фильмах?...

Почему индейцы — родственники россиян: что нашли в ДНК коренных американцев?
Как связан древний мальчик с Байкала с племенем в Амазонии? Какой подарок от древних людей помог заселить Америку?...

Первый раз настоящий сахар нашли в космосе: почему ученые в восторге?
Чем космический сахар отличается от земного? И почему биологи говорят, что это сенсация?...

За что Владимир Ленин трижды выдвигался на Нобелевскую премию?
Почему самая большая «мирная» награда так и не дошла до главного большевика?...

Битва под Каневом: почему на 350 лет замолчали сокрушительную победу России?
Неудобная победа, предательство и идеология. Мы бы могли вообще не узнать об этом триумфе русского оружия...

Прорыв в астрономии: найти жизнь в космосе будет гораздо проще
Ученых не пугает даже погрешность в 20%. Зато будут просканированы тысячи планет...

Старше на 500 лет: что скрывает «тестовая модель» Стоунхенджа?
Сначала «тренировались» на дереве, а потом перешли на камень...

Новая вселенная внутри звезды: почему Эйнштейн мог ошибаться насчет черных дыр
Больше 20 лет эта гипотеза в буквальном смысле раздирает мир науки. Но, возможно, именно она выведет ученых из тупика сингулярности...