В лаборатории биоинженерной робототехники профессора Фумии Ииды на инженерном факультете Кембриджа исследователи разрабатывают решения обеих проблем. Их роборука может захватывать различные объекты с нужным усилием, затрачивая при этом минимум энергии.
Они создали недорогую, но энергоэффективную роботизированную руку с чувствительной «кожей». Устройство берёт и удерживает различные предметы одним движением запястья. Результаты опытов опубликованы в журнале Advanced Intelligent Systems («Передовые интеллектуальные системы»).
Роборуку натренировали хватать различные предметы и «понимать» благодаря датчикам в «коже», уронит ли она их. Роборука не может самостоятельно двигать пальцами, но такой тип движения значительно упрощает управление роботом и делает его более энергоэффективным, чем роботы с полностью моторизованными пальцами. Исследователи говорят, что их настраиваемая конструкция может пригодится при создании недорогой робототехники.
В предыдущих экспериментах наша лаборатория показала, что можно добиться значительного диапазона движений руки робота просто за счёт запястья. Мы хотели понять, сможет ли такая рука не только хватать предметы, но и понимать, уронит она их или нет, и адаптироваться
— Томас Джордж-Турутел из Восточного университетского колледжа Лондона (UCL), соавтор исследования.
Учёные использовали напечатанную на 3D-принтере антропоморфную руку, совмещённую с тактильными датчиками, чтобы рука могла чувствовать, к чему прикасается. Рука была способна только на так называемые пассивные движения, основанные на сокращениях запястья.
Команда провела более 1200 тестов и поняли, что их роборука обладает некоторой упругостью и может поднимать предметы, не шевеля пальцами, пояснил автор работы Киран Гилдей, который сейчас работает в Федеральной политехнической школе Лозанны (EPFL), Швейцария.
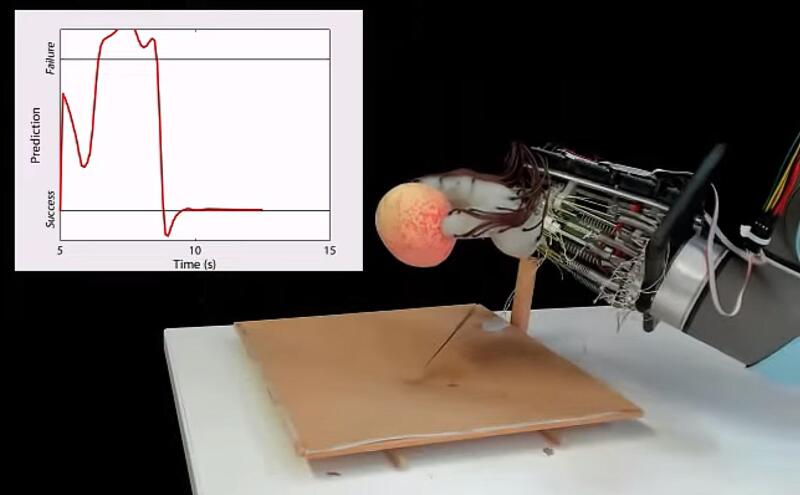
Тактильные датчики дают роботу представление о том, хорош ли захват, поэтому манипулятор знает, когда предмет начинает выскальзывать. Робот путём проб и ошибок выяснил, какой захват будет успешным. Изначально его обучили использовать маленькие пластиковые шарики, напечатанные на 3D-принтере, и хватал он их с помощью определённого действия после демонстрации человеком.
После тренировки с шариками робот пытался хватать различные предметы, включая персик, компьютерную мышь и рулон пузырчатой плёнки. При этих экспериментах рука смогла успешно схватить 11 из 14 предметов. То есть устройство при относительной простоте может поднимать множество предметов с помощью одной и той же стратегии.
В будущем систему можно развить несколькими способами. Например, добавив компьютерное зрение или обучив робота захватывать более широкий спектр объектов.