
Роботизированный захват научили перемещать сразу несколько предметов
Инженеры из Сеульского национального университета изобрели роботизированный захват под названием MOGrip, который умеет перемещать несколько предметов одновременно. Чтобы повысить эффективность, они стремились добиться от устройства способностей к манипулированию объектами, как у человеческой руки.
Исследование, в котором проанализировали работу человеческой кисти и успешно применили эти знания при создании роботизированного концепта, опубликовали в научном журнале Science Robotics.
Совокупность способов, которыми рука человека берёт разные мелкие вещи, называется многопредметным захватом. Это говорит само за себя: мы умеем последовательно брать одной кистью и удерживать сразу, например, ластик, ручку и карандаш.
Специалисты из Сеула сообщили, что работа над проектом началась в 2019 году после наблюдений за персоналом фабрики. Её работники перемещали несколько предметов одновременно, чтобы повысить эффективность труда.
Профессор Кю-Джин Чо объяснил, что иные робототехнические конструкции обычно предназначались для захвата одного объекта. А если кто-то пытался сконструировать аппараты для одновременного взятия нескольких предметов, то такие манипуляторы получались громоздкими, из нескольких небольших захватов, скомпонованных рядом.
Чтобы изобретать роботов, зачастую нужен взгляд на действия человеческих конечностей как бы со стороны. Итак, чтобы перенести несколько объектов в кисти одной руки, люди берут их пальцами и прижимают к ладони для удержания. При этом кончики пальцев высвобождаются для захвата новых целей, и так может повторяться, чтобы в итоге нести пригоршней несколько предметов. Если необходимо, люди умеют также высвобождать из горсти зажатые в ней вещи по одной, постепенно.
В итоге MOGrip получился на нашу кисть совсем не похожим внешне. Но у него тоже есть «пальцы», которые могут перемещать предметы, и созданная по принципу конвейера «ладонь» для одновременного удержания нескольких предметов. Пальцы, приводимые в действие двумя двигателями, захватывают предметы и переносят их на «ладонь». Правильнее даже сказать, внутрь «ладони».
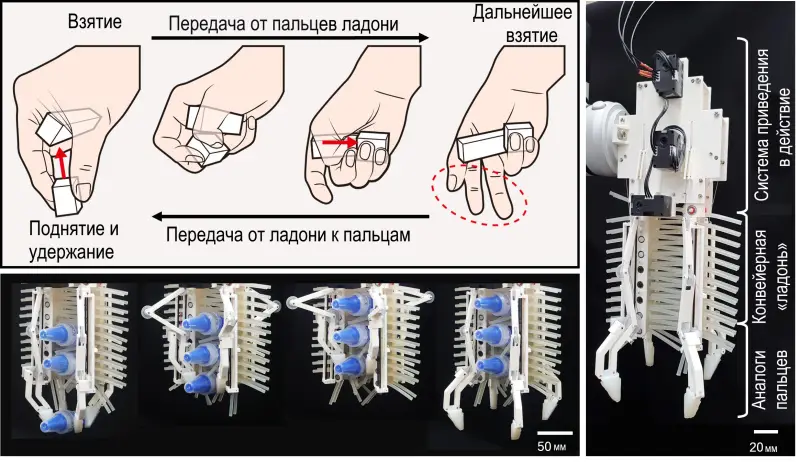
«Пальцы» по отдельности выполняют захватывающие и отпускающие движения, упрощая управление конструкцией. Конвейерная «ладонь» из пары лент с эластичными стержнями приводится в движение одним двигателем. При вращении лент объекты помещаются между стержнями, что позволяет одновременно удерживать и перемещать несколько разных предметов.
Исследователи доказали, что MOGrip может переложить восемь предметов всего двумя возвратно-поступательными движениями. По сравнению с манипуляциями одним предметом это сократило время всего процесса на 34%, а расстояние, на которое перемещался сам MOGrip, на 71%. Кроме того, в обычных домашних условиях устройство успешно контролировало все предметы на столе и размещало их по отдельности в нужных местах.
Предполагается, что MOGrip послужит не только в складской логистике и в быту, но и будет полезен, например, для сортировки мусора.
Профессор Чо сказал, что задача робототехников не в том, чтобы просто имитировать движения человека, а в том, чтобы выявить основные принципы и адаптировать их для робототехники.
Видимо, тем самым специалист из Сеула решил подготовить публику к тому, что наиболее эффективные роботы будут совсем не похожи на людей. Главное — чтобы справлялись.
Исследование, в котором проанализировали работу человеческой кисти и успешно применили эти знания при создании роботизированного концепта, опубликовали в научном журнале Science Robotics.
Совокупность способов, которыми рука человека берёт разные мелкие вещи, называется многопредметным захватом. Это говорит само за себя: мы умеем последовательно брать одной кистью и удерживать сразу, например, ластик, ручку и карандаш.
Специалисты из Сеула сообщили, что работа над проектом началась в 2019 году после наблюдений за персоналом фабрики. Её работники перемещали несколько предметов одновременно, чтобы повысить эффективность труда.
Профессор Кю-Джин Чо объяснил, что иные робототехнические конструкции обычно предназначались для захвата одного объекта. А если кто-то пытался сконструировать аппараты для одновременного взятия нескольких предметов, то такие манипуляторы получались громоздкими, из нескольких небольших захватов, скомпонованных рядом.
Чтобы изобретать роботов, зачастую нужен взгляд на действия человеческих конечностей как бы со стороны. Итак, чтобы перенести несколько объектов в кисти одной руки, люди берут их пальцами и прижимают к ладони для удержания. При этом кончики пальцев высвобождаются для захвата новых целей, и так может повторяться, чтобы в итоге нести пригоршней несколько предметов. Если необходимо, люди умеют также высвобождать из горсти зажатые в ней вещи по одной, постепенно.
В итоге MOGrip получился на нашу кисть совсем не похожим внешне. Но у него тоже есть «пальцы», которые могут перемещать предметы, и созданная по принципу конвейера «ладонь» для одновременного удержания нескольких предметов. Пальцы, приводимые в действие двумя двигателями, захватывают предметы и переносят их на «ладонь». Правильнее даже сказать, внутрь «ладони».
«Пальцы» по отдельности выполняют захватывающие и отпускающие движения, упрощая управление конструкцией. Конвейерная «ладонь» из пары лент с эластичными стержнями приводится в движение одним двигателем. При вращении лент объекты помещаются между стержнями, что позволяет одновременно удерживать и перемещать несколько разных предметов.
Исследователи доказали, что MOGrip может переложить восемь предметов всего двумя возвратно-поступательными движениями. По сравнению с манипуляциями одним предметом это сократило время всего процесса на 34%, а расстояние, на которое перемещался сам MOGrip, на 71%. Кроме того, в обычных домашних условиях устройство успешно контролировало все предметы на столе и размещало их по отдельности в нужных местах.
Предполагается, что MOGrip послужит не только в складской логистике и в быту, но и будет полезен, например, для сортировки мусора.
Профессор Чо сказал, что задача робототехников не в том, чтобы просто имитировать движения человека, а в том, чтобы выявить основные принципы и адаптировать их для робототехники.
Видимо, тем самым специалист из Сеула решил подготовить публику к тому, что наиболее эффективные роботы будут совсем не похожи на людей. Главное — чтобы справлялись.
- Дмитрий Ладыгин
- science.org
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Артефакты из мезозоя помогли одержать победу в Куликовской битве
Российский геолог открыл неизвестную страницу в истории знакового сражения...

Деревянной конструкции... 500 тысяч лет: его построили не Homo Sapiens. Но тогда кто?
Археологи говорят, что, кроме каменного, бронзового и железного, был еще один век, сейчас почти потерянный...

Аризонский инцидент: почему самолет засосало в гигантский кратер?
Крушение было неизбежно, ведь природной аномалии удалось даже опытнейшего пилота....

14 памятников и храм высотой 12 метров: в джунглях Юкатана нашли неразграбленный город майя
Как населенный пункт веками ускользал от искателей сокровищ и что его открытие значит для науки?...

Река длиной 60 километров: зачем она протекает по дну Черного моря?
Ученые говорят: от этого потока зависит абсолютно все живое в море. Почему так происходит?...

Стало известно, из чего состоял астероид, убивший динозавров
Новое исследование переписало картину глобального вымирания, случившегося 66 миллионов лет назад...

Древнее «чудовище» в Кавказских горах пришлось вырубать молотками и зубилами
Новое открытие должно закрыть многие белые пятна в истории планеты...

Загадочный древнерусский город: в одном районе приносили людей жертву и в другом — верили в Христа
Изломанный человеческий череп в основании печи поразил российских археологов...

Эта гроза с молниями никогда не заканчивается. Ученые, наконец, выяснили почему
Маракайбо: 28 вспышек в минуту, 140-160 дней в году, риск попадания молнии выше всех на планете...

NASA скрывало следы НЛО: ученый рассказал об аномалиях лунных миссий
Странные шары сопровождали астронавтов на Луне, и этот феномен до сих пор не разгадан...

Почему кашалоты спят вверх головой: ученые все-таки разгадали секрет хищных китов
Тайна оказалась связанной с «чудесными» пузырьками воздуха...