
Физики придумали робота со свойствами жидкости и твёрдого тела одновременно
Физики разрабатывают модульного робота со свойствами и жидкости, и твёрдого тела. Конструкция позволяет отдельным блокам двигаться как сплочённое целое.
Что общего у косяка рыб, пчелосемьи и синхронного полёта сотен скворцов в стае? Они проявляют поведение, которое называется роением. Иными словами, движутся синхронно, как бы в составе жидкости, изменяющей форму. Специалисты из Чикаго решили взглянуть на явление через призму механики, чтобы применить принципы физики в робототехнике.

Способность роя менять форму подобно жидкости, двигаться согласованно без каких-либо сигналов от вожака и реагировать на окружающие условия вдохновила коллектив авторов на изобретение, которое они назвали Granulobot («Гранулобот»), то есть состоящий из небольших элементов. Представленный образец может разъединяться на части, собираться опять и перестраиваться для адаптации к окружающим условиям. И в зависимости от конфигурации может действовать как твёрдое тело либо текучая жидкость. Совокупность деталей «стирает различия между роботами разного типа — мягкими, модульными и роевыми», отметили изобретатели, описывая прототип в журнале Science Robotics («Научная робототехника»).
«Гранулированный робот» — это комплекс из цилиндрических деталей, похожих на шестерни с парой магнитов, вращающихся вокруг оси. Один магнит в каждом «бочонке» вращается свободно, а другой приводится в движение двигателем на батарейках. Конструкция даёт возможность элементам соединяться за счёт притяжения магнитов, а затем толкать соседние детали и заставлять их вращаться. Взаимодействие элементов запускает движение агрегата в целом.
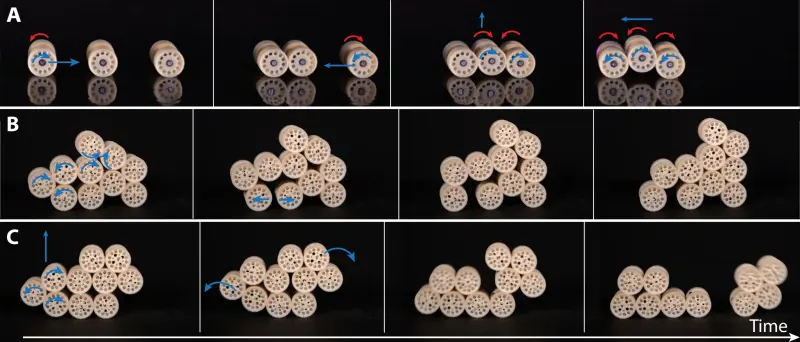
На иллюстрации красные стрелки указывают направление вращения приводимых в действие магнитов. Синие — процесс перегруппировки. Отдельные блоки «Гранулобота» могут вращаться и с помощью магнита «слипаться» в более крупные блоки, которые умеют перекатываться. Оказывая крутящее влияние на соседей, отдельные узлы и группы узлов могут изменять их положение, то есть форму сборки. За счёт крутящего момента, превышающего магнитную связь между соседними блоками, они могут отделяться и самостоятельно формировать автономных, отдельных роботов.
Система, меняющая форму, способна забираться в укромные уголки и трещины. И то, и другое было бы полезно, например, при поисково-спасательных работах, объяснил Генрих Ягер, профессор физики Чикагского университета.
Чтобы робот умел изменять форму и выполнять различные функции, крайне важна его способность варьировать жёсткость и мягкость, как того потребует момент. Подобное происходит, когда частицы в неупорядоченной системе оказываются настолько близко друг к другу, что сталкиваются между собой, и их «текучесть» прекращается. Генрих Ягер сравнил это с вождением по шоссе: если столкнуться бампер к бамперу с другими автомобилями, то движение со скрежетом стопорится. Когда это происходит в материале из подвижных элементов, добавил Ягер, то наблюдается, по сути, тот же затор.
Ещё один пример — пачка молотого кофе в вакуумной упаковке. Если нарушить упаковку, то порошок может высыпаться. Такой принцип оказался настолько хорош, что эти же изобретатели использовали его ранее, в 2010 году, для конструкции мягкого роботизированного захвата (на фото ниже), который способен удерживать предметы независимо от их формы.

Цилиндры, из которых состоит «Гранулобот», больше, чем крупицы кофе, но принцип аналогичный. «Затор» из элементов — главное для того, чтобы «Гранулобот» мог переключиться от податливости к твёрдости конструкции.
Генрих Ягер пояснил, что на лежащие в основе «Гранулобота» физические принципы не влияют масштаб или температура. Поэтому варианты такого устройства могут быть разных размеров и служить, например, под водой или в открытом космосе.
Что общего у косяка рыб, пчелосемьи и синхронного полёта сотен скворцов в стае? Они проявляют поведение, которое называется роением. Иными словами, движутся синхронно, как бы в составе жидкости, изменяющей форму. Специалисты из Чикаго решили взглянуть на явление через призму механики, чтобы применить принципы физики в робототехнике.
Способность роя менять форму подобно жидкости, двигаться согласованно без каких-либо сигналов от вожака и реагировать на окружающие условия вдохновила коллектив авторов на изобретение, которое они назвали Granulobot («Гранулобот»), то есть состоящий из небольших элементов. Представленный образец может разъединяться на части, собираться опять и перестраиваться для адаптации к окружающим условиям. И в зависимости от конфигурации может действовать как твёрдое тело либо текучая жидкость. Совокупность деталей «стирает различия между роботами разного типа — мягкими, модульными и роевыми», отметили изобретатели, описывая прототип в журнале Science Robotics («Научная робототехника»).
«Гранулированный робот» — это комплекс из цилиндрических деталей, похожих на шестерни с парой магнитов, вращающихся вокруг оси. Один магнит в каждом «бочонке» вращается свободно, а другой приводится в движение двигателем на батарейках. Конструкция даёт возможность элементам соединяться за счёт притяжения магнитов, а затем толкать соседние детали и заставлять их вращаться. Взаимодействие элементов запускает движение агрегата в целом.
На иллюстрации красные стрелки указывают направление вращения приводимых в действие магнитов. Синие — процесс перегруппировки. Отдельные блоки «Гранулобота» могут вращаться и с помощью магнита «слипаться» в более крупные блоки, которые умеют перекатываться. Оказывая крутящее влияние на соседей, отдельные узлы и группы узлов могут изменять их положение, то есть форму сборки. За счёт крутящего момента, превышающего магнитную связь между соседними блоками, они могут отделяться и самостоятельно формировать автономных, отдельных роботов.
Система, меняющая форму, способна забираться в укромные уголки и трещины. И то, и другое было бы полезно, например, при поисково-спасательных работах, объяснил Генрих Ягер, профессор физики Чикагского университета.
Чтобы робот умел изменять форму и выполнять различные функции, крайне важна его способность варьировать жёсткость и мягкость, как того потребует момент. Подобное происходит, когда частицы в неупорядоченной системе оказываются настолько близко друг к другу, что сталкиваются между собой, и их «текучесть» прекращается. Генрих Ягер сравнил это с вождением по шоссе: если столкнуться бампер к бамперу с другими автомобилями, то движение со скрежетом стопорится. Когда это происходит в материале из подвижных элементов, добавил Ягер, то наблюдается, по сути, тот же затор.
Ещё один пример — пачка молотого кофе в вакуумной упаковке. Если нарушить упаковку, то порошок может высыпаться. Такой принцип оказался настолько хорош, что эти же изобретатели использовали его ранее, в 2010 году, для конструкции мягкого роботизированного захвата (на фото ниже), который способен удерживать предметы независимо от их формы.
Цилиндры, из которых состоит «Гранулобот», больше, чем крупицы кофе, но принцип аналогичный. «Затор» из элементов — главное для того, чтобы «Гранулобот» мог переключиться от податливости к твёрдости конструкции.
Генрих Ягер пояснил, что на лежащие в основе «Гранулобота» физические принципы не влияют масштаб или температура. Поэтому варианты такого устройства могут быть разных размеров и служить, например, под водой или в открытом космосе.
- Дмитрий Ладыгин
- youtu.be/yOXL4AXMst0; youtu.be/V4f_1_r80RY; techxplore.com; phys.org
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Конец 30-летней легенды: Эверест может лишиться одного из главных символов
Эксперты предупреждают индийское правительство: экспедиция будет крайне опасной и вряд ли закончится успехом. Почему?...

Феномен Великой Зеленой стены: за счет чего 66 миллиардов деревьев, высаженных Китаем, растут быстрее естественных лесов?
И почему ученые решили, что природные леса все-таки лучше рукотворных?...

Тайна золотого вулкана: почему гора в Антарктике извергает драгоценный металл?
Ученые уже 30 лет пытаются разгадать этот природный детектив. Что удалось узнать исследователям...

Тайну четырех черных яиц с 6000-метров глубины океана раскрыли японские ученые
Дно морей изучено гораздо хуже, чем поверхность Марса и Луны. Неудивительно, что исследователи постоянно делают открытия...

Проклятье 30 июня: почему в этот день произошло столько крупных катастроф?
Официально виновата погода, но изучение деталей до сих пор вызывает множество вопросов...

Секрет охоты на мамонтов открыт: ученые только что разрушили один из главных мифов древней истории
То, что наука считала исторической реконструкцией, оказалось обычным эпизодом из голливудского фильма...

Ученые «разжаловали» индонезийских хоббитов из умников: огнем не владели, подъедались за варанами
Что же заставило археологов переписать целый пласт древней истории?...

Аномальный дождь из рыбы: 150 лет ученые не могут объяснить эту тайну природы
Это явление официально считается неразгаданным феноменом и проходит в категории чудес и головной боли для науки...

Космический детектив: почему уникальную планету GJ 3378b никак не признают «второй Землей»?
Сами ученые призывают не торопиться с выводами, ведь истории с инопланетным объектом существует множество интересных нюансов...

316 лет на троих: ученые назвали три секрета феноменального долголетия сестер Нунес
Специалисты говорят: важно получить «хорошие гены», но еще важнее ими правильно распорядиться...

Серная кислота в небе: чем грозит пассажирам новый экологический проект?
Эксперты говорят: от этих планов вряд ли откажутся. Но есть ли у нас время, чтобы подготовиться?...