Подобные микророботы абсолютно безопасны для человеческого организма и могут работать в труднодоступных местах, что делает их перспективными для медицинских исследований.
Мы можем работать с биологическими образцами удаленно и без риска их загрязнения. Такое новшество может улучшить существующие процедуры и открыть путь новым, ранее недоступным ввиду ограничений медицинских технологий
— Франко Пиньян Басуальдо, научный сотрудник Лаборатории хирургической робототехники, автор-корреспондент публикации.
Союз медицины и роботов
Профессор Сартак Мисра, руководитель лаборатории, концентрирует свои усилия на разработке инновационных решений для широкого круга клинически актуальных задач, включая биомедицинскую визуализацию, автоматизацию медицинских процедур и создание микроробототехнических инструментов.
Исследования в области микроробототехники открывают перед человечеством новые горизонты и перспективы. С их помощью возможно создание революционных методов лечения и диагностики заболеваний, а также решение множества сложных задач в сфере биомедицины. На основе этой технологии можно в корне изменить подход к проведению хирургических операций и других медицинских процедур. Это шаг в будущее, где микророботы могут стать незаменимыми помощниками врачей.

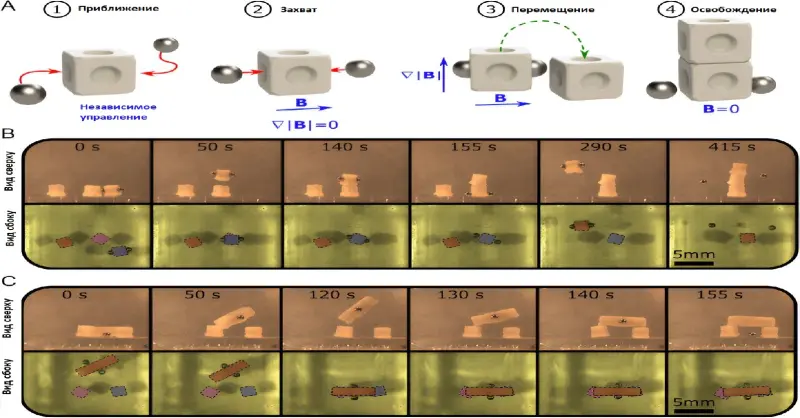
Результаты экспериментального совместного захвата и сборки. Магнитные агенты представляют собой сферы из нержавеющей стали диаметром 1 мм, а пассивные объекты — кубики размером 2 мм, напечатанные на 3D-принтере. А) Процедура состояла из четырех этапов: приближения, захвата, пермещения и освобождения. Сплошные красные стрелки показывают движение магнитных агентов, а пунктирная зеленая стрелка показывает движение предмета. B) Снимки эксперимента по захвату и укладке трех кубиков. C) Снимки захвата и укладки бруса на вершину конструкции с двумя кубиками. Пассивные объекты (кубы и балки) выделены для большей наглядности.
Исследование проводилось в рамках европейского проекта RĔGO (программа Horizon Europe), целью которого является разработка инновационного набора микроразмерных, реагирующих на стимулы, несвязанных групп роботов на базе искусственного интеллекта. Результаты были опубликованы в журнале Advanced Intelligent Systems.