
Самый маленький в мире летающий робот способен поражать цели
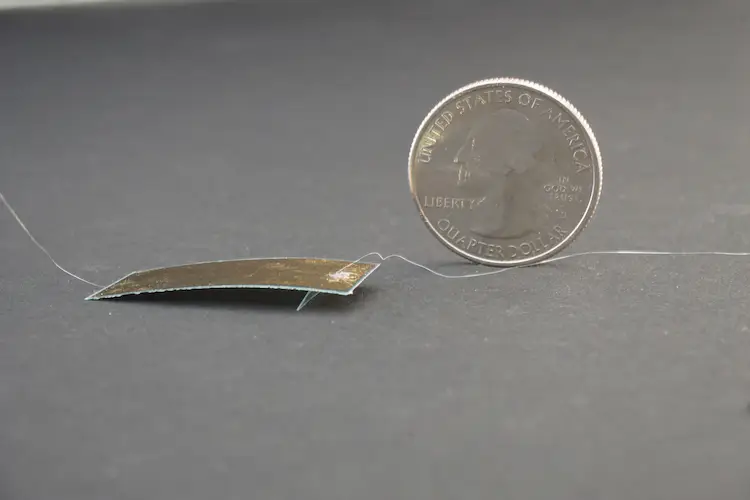
Инженеры из Калифорнийского университета в Беркли создали удивительно миниатюрного робота-летуна. Подобно шмелю, он может переноситься с цветка на цветок, зависать в воздухе, менять траекторию и даже поражать небольшие цели. Устройство диаметром менее 1 сантиметра весит всего 21 миллиграмм, что делает его самым маленьким в мире беспроводным роботом, способным к управляемому полёту.
Профессор машиностроения Ливэй Лин заявил, что новым летающим роботом можно управлять по беспроводной сети. В итоге тот будет подлетать к заданной цели и отрабатывать по ней, имитируя, например, механизм опыления, когда пчела собирает нектар и улетает. Только лишь механизм опыления?
Чтобы робот-шмель мог летать, он должен быть оснащён источником питания, например аккумулятором, и электроникой для управления полётом. И то, и другое бывает сложно встроить в очень маленькие изделия. Чтобы решить проблему, Лин и его коллеги использовали внешнее магнитное поле для питания и управления полётом.
Робот выглядит как небольшой пропеллер и оснащён двумя маленькими магнитами. Под воздействием внешнего магнитного поля они притягиваются и отталкиваются, заставляя пропеллер вращаться. Так создаётся достаточная подъёмная сила, чтобы робот взвился над землёй. Траекторией полёта можно управлять с точностью, изменяя силу магнитного поля.

Испытания показали, что прототип диаметром 9,4 мм не ломался при столкновениях, например, со стенками лабораторной камеры, сохраняя лётные качества. Как правило, отклонения угла тангажа (килевой качки) при этом было в пределах 23 градусов, так что его всегда было можно выровнять.
Соавтор исследования Фанпин Суй сказал, что миниатюрных роботов-летунов можно использовать для искусственного опыления или осмотра тесных пространств, например, трубопроводов.
Правда, пока что новинка способна лишь к пассивному полёту. Это означает, что, в отличие от самолётов или дронов, у него нет бортовых датчиков для определения текущего местоположения или траектории, и он не может корректировать свои движения в реальном времени. Таким образом, хотя робот способен летать по точным траекториям, внезапное изменение окружающей среды, тот же сильный ветер, могут сбить его с курса.
Но аспирант Вэй Юэ, соавтор исследования, пообещал, что в будущем машиностроители из Беркли постараются добавить активное управление, которое позволит менять положение робота в реальном времени, то бишь рулить им, как угодно.
Для управления роботом также требуется сильное магнитное поле, создаваемое электромагнитной катушкой. Однако дальнейшее уменьшение робота до менее чем 1 мм в диаметре — примерно до размеров москита — может сделать его достаточно лёгким, чтобы им можно было управлять с помощью гораздо более слабых магнитных полей, например, создаваемых радиоволнами.
Помимо нового робота, вдохновлённого шмелями, команда Линя также создала робота, вдохновлённого тараканами, который может ползать по полу и уцелеет, если на него наступить. Устройство не выглядит, как таракан, это лишь прямоугольник размером с насекомое, но он передвигается со скоростью таракана и может выдержать вес человека, в отличие от настоящего таракана.
А Юэ отдельно трудится над новыми «роями» (группами) роботов, которые могут работать сообща, как муравьи, над задачами, непосильными для одного такого устройства. Инженер объяснил, что занимается роботами длиной 5 мм, которые могут ползать, ехать и вращаться, а также функционировать в команде, объединяясь в цепочки и массивы. Он считает, что они были бы полезны в хирургии, формируя стенты (расширители), удаляя тромбы или выполняя другие задачи.
А из головы всё не выходит фраза из вузовской публикации со словами hit small targets — «поражать небольшие цели».
Профессор машиностроения Ливэй Лин заявил, что новым летающим роботом можно управлять по беспроводной сети. В итоге тот будет подлетать к заданной цели и отрабатывать по ней, имитируя, например, механизм опыления, когда пчела собирает нектар и улетает. Только лишь механизм опыления?
Чтобы робот-шмель мог летать, он должен быть оснащён источником питания, например аккумулятором, и электроникой для управления полётом. И то, и другое бывает сложно встроить в очень маленькие изделия. Чтобы решить проблему, Лин и его коллеги использовали внешнее магнитное поле для питания и управления полётом.
Робот выглядит как небольшой пропеллер и оснащён двумя маленькими магнитами. Под воздействием внешнего магнитного поля они притягиваются и отталкиваются, заставляя пропеллер вращаться. Так создаётся достаточная подъёмная сила, чтобы робот взвился над землёй. Траекторией полёта можно управлять с точностью, изменяя силу магнитного поля.
Испытания показали, что прототип диаметром 9,4 мм не ломался при столкновениях, например, со стенками лабораторной камеры, сохраняя лётные качества. Как правило, отклонения угла тангажа (килевой качки) при этом было в пределах 23 градусов, так что его всегда было можно выровнять.
Соавтор исследования Фанпин Суй сказал, что миниатюрных роботов-летунов можно использовать для искусственного опыления или осмотра тесных пространств, например, трубопроводов.
Правда, пока что новинка способна лишь к пассивному полёту. Это означает, что, в отличие от самолётов или дронов, у него нет бортовых датчиков для определения текущего местоположения или траектории, и он не может корректировать свои движения в реальном времени. Таким образом, хотя робот способен летать по точным траекториям, внезапное изменение окружающей среды, тот же сильный ветер, могут сбить его с курса.
Но аспирант Вэй Юэ, соавтор исследования, пообещал, что в будущем машиностроители из Беркли постараются добавить активное управление, которое позволит менять положение робота в реальном времени, то бишь рулить им, как угодно.
Для управления роботом также требуется сильное магнитное поле, создаваемое электромагнитной катушкой. Однако дальнейшее уменьшение робота до менее чем 1 мм в диаметре — примерно до размеров москита — может сделать его достаточно лёгким, чтобы им можно было управлять с помощью гораздо более слабых магнитных полей, например, создаваемых радиоволнами.
Помимо нового робота, вдохновлённого шмелями, команда Линя также создала робота, вдохновлённого тараканами, который может ползать по полу и уцелеет, если на него наступить. Устройство не выглядит, как таракан, это лишь прямоугольник размером с насекомое, но он передвигается со скоростью таракана и может выдержать вес человека, в отличие от настоящего таракана.
А Юэ отдельно трудится над новыми «роями» (группами) роботов, которые могут работать сообща, как муравьи, над задачами, непосильными для одного такого устройства. Инженер объяснил, что занимается роботами длиной 5 мм, которые могут ползать, ехать и вращаться, а также функционировать в команде, объединяясь в цепочки и массивы. Он считает, что они были бы полезны в хирургии, формируя стенты (расширители), удаляя тромбы или выполняя другие задачи.
А из головы всё не выходит фраза из вузовской публикации со словами hit small targets — «поражать небольшие цели».
- Дмитрий Ладыгин
- news.berkeley.edu
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Битва под Каневом: почему на 350 лет замолчали сокрушительную победу России?
Неудобная победа, предательство и идеология. Мы бы могли вообще не узнать об этом триумфе русского оружия...

Бомбы с орбиты: почему советская технология, воскрешенная Китаем, встревожила США?
Американцы слишком долго считали свои системы раннего предупреждения лучшими на планете. Теперь......

С Ноева ковчега сняли запрет: что покажут радары на Арарате?
История, которую больше всего высмеивали ученые, неожиданно становится все более реальной...

Дикий народ чучуна: Кто наводил ужас на коренное население Сибири?
Йети? Люди-изгои? Древнее племя? Пока что вопросов больше, чем ответов...

Почему их ДНК не меняется уже 42 000 лет: определен самый древний народ на планете
Три раза предки жителей Океании встречались с исчезнувшими видами людей, и это в корне изменило их гены...

Тайна «косого глаза» Венеры раскрыта: что увидела нейросеть на картинах Боттичелли?
Художник нарисовал пять портретов прекрасной Симонетты Веспуччи. И каждое полотно еще больше подтверждает страшный диагноз...

Мрачный прогноз для США из 1995 года сбылся: в чем великий ученый Саган оказался прав?
Исследователь говорил: все плохо, но еще не все потеряно. Его советы могут реально помочь всему человечеству...

Новая вселенная внутри звезды: почему Эйнштейн мог ошибаться насчет черных дыр
Больше 20 лет эта гипотеза в буквальном смысле раздирает мир науки. Но, возможно, именно она выведет ученых из тупика сингулярности...

Прорыв в астрономии: найти жизнь в космосе будет гораздо проще
Ученых не пугает даже погрешность в 20%. Зато будут просканированы тысячи планет...

Марс под вопросом: что может обнулить иммунитет у космонавтов?
И почему защита организма перестает видеть микробы, выжившие в космосе?...

43 — проклятый возраст Рюриковичей: почему многие князья не переживали этот роковой рубеж?
Генетики говорят: русская династия слишком поздно поняла, что попала в ловушку «чистой» крови...

Снегопады в Антарктиде становятся все аномальнее: и ученые, наконец-то, знают почему?
Ученым придется пересмотреть все климатические модели Шестого континента. Кстати, снега там будет выпадать с каждым годом все больше...

Доказана жизнь на спутнике Юпитера: как же бактериям удалось добраться с Земли на Европу?
За 3,5 миллиарда лет земные бактерии могли долететь до 105 звездных систем. Так что у Европы есть все шансы на «заражение»...

Сначала Стоунхендж был... не каменным: найден прототип легендарного святилища
Доисторическая религия оказалась старше на 500 лет, чем считали ученые. И она играла огромную роль в жизни древних людей...

Бельгийскую разведку снова взломали: хакеры целый год качали оттуда секретные данные
Эксперты говорят: проникновение было замечено совершенно случайно. И это пугает...