
Электронный «жук-носорог» с пинцетом выполнит точную работу в экстремальных условиях
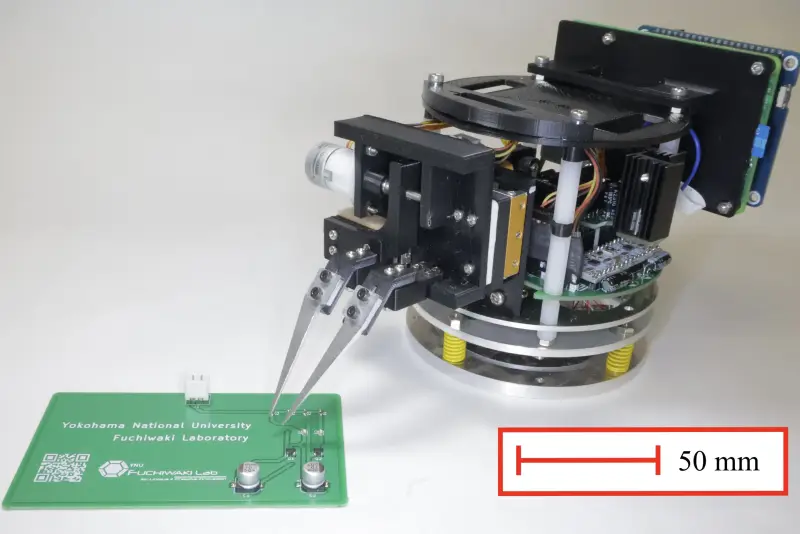
Инженеры из Национального университета Йокогамы создали миниатюрного автономного робота, который способен действовать с максимальной точностью в самых экстремальных либо стеснённых условиях. Изобретению дали название «Holonomic Beetle 3» («Голономный жук 3»), или HB-3.
Голономный робот в принципе — это устройство, которое может двигаться в любом направлении на плоскости без необходимости предварительно разворачиваться. Простыми словами, он может ехать вперед, назад, вбок и вращаться на месте, как угодно, благодаря специальным механизмам. Представим себе машинку на радиоуправлении, которая может мгновенно поехать вбок, не разворачиваясь, — это и есть голономный робот. Такие роботы часто используются там, где нужна высокая манёвренность, например, для решения задач складской логистики.
HB-3 рассчитан на то, чтобы удовлетворить возрастающую потребность в точных манипуляциях среди различных отраслей, включая автоматизацию лабораторий, медпроцедуры и научные исследования. Устройство было бы полезно при работе и с наноматериалами, и с клетками живых тканей, и при сборке микросхем, в общем, там, где присутствие человека нежелательно либо просто невозможно. Особенно актуально это в вакуумных средах, в особо чистых помещениях, в биозащищённых камерах и так далее.
HB-3 создан по примеру анатомии и двигательных способностей жука-носорога, сочетая в себе пьезоэлектрические приводы с автономной технологией, позволяющей осуществлять микроскопические манипуляции.
Пьезоэлектрические приводы — это устройства, которые преобразуют электрическую энергию в механическое движение с помощью пьезоэлектрического эффекта. Простыми словами, это такие «двигатели», которые работают за счёт специальных материалов (пьезоэлектриков), немного изменяющих свою форму, когда к ним прикладывают электрическое напряжение. Пьезоэлектриками служат, например, кварц или керамика, которые сжимаются или расширяются, когда на них подают электроток. Происходящие крошечные движения используются для точного и контролируемого перемещения в пространстве.
За последние годы автономные роботы стали использоваться в различных отраслях промышленности, на местах стихийных бедствий, в медицине и в замкнутых пространствах, куда нет доступа людям. В то же время полным ходом идёт миниатюризация электронных составляющих и для таких устройств в том числе. Так, специалисты работают над созданием микроскопических узлов в виде батарей и суперконденсаторов толщиной всего в несколько микрон.
Обычные устройства описанного выше предназначения оставались громоздкими и тяжёлыми по сравнению с уже появившимися на рынке крошечными деталями. В общем, оставалось много возможностей для совершенствования роботизированной электроники с точки зрения энергоэффективности и экономии места. Даже если бы управляющие схемы и аккумуляторы стали предельно крошечными, их диапазон и свобода действий всё равно были бы сильно ограничены несоответствием прочих компонентов.
Для решения таких задач различные специалисты придумывали всяческие прецизионные (высокоточные) приводы — по сути, «мышцы» робота, которые преобразуют электрическую, гидравлическую или пневматическую энергию в движение. В частности, как очень перспективные для таких целей проявили себя пьезоэлектрические приводы.
Наблюдается общая тенденция к созданию всё более миниатюрных роботов и соответственно маленьких захватов-манипуляторов. Однако до сих пор не удавалось построить передвижные манипуляторы, которые бы выполняли операции на мирокуровне и при этом объединяли бы в себе пьезоэлектрические приводные технологии, были бы автономными и применимыми в реальных условиях.
Конструкция HB-3 получилась компактной и лёгкой — массой всего 515 граммов и 10 куб. см в объёме. Интегрированная схема управления на базе одноплатного компьютера устранила проблемы, которые возникали в предшествующих исследованиях тех же робототехников из-за электропроводов. HB-3 также оснащён встроенной камерой и выполняет задачи с помощью алгоритмов машинного обучения, которые позволяют ему без малейших промедлений корректировать движения. Следует отметить, что последняя функция отсутствует в предыдущих манипуляторах такого уровня.
В ходе дотошных испытаний HB-3 показал впечатляющие результаты при выполнении задач в тесном пространстве с использованием различных инструментов. Например, робот функционировал как точный пинцет для захвата и размещения микросхем или инжектор (подающий элемент) для нанесения крошечных капель. При этом точность была в пределах десятых и сотых долей миллиметра, а 87% задач были выполнены успешно.
Изобретатели утверждают, что на базе HB-3 можно создать различные прецизионные инструменты: измерительные щупы, паяльники, отвёртки и другие очень точные приспособления по мере необходимости и в различных масштабах — от метра до нанометра.
Один из разработчиков компактной машины Оми Футиваки, доцент инженерного факультета, заявил, что они с коллегами смогли повысить миниатюрность, чтобы воплотить в реальность не привязанное к чему-либо устройство для работ в тесных и опасных пространствах.
— Футиваки.
Инженеры из Йокогамы планируют доработать своего маленького «жука». Они считают, что скорость обработки данных HB-3, зависящую от процессора Raspberry Pi, можно увеличить. А время, которое требуется роботу для обнаружения объектов, удастся сократить за счёт передачи функции по обнаружению целей на внешний высокопроизводительный компьютер.
В дальнейшем исследователи также планируют повысить скорость и точность робота. В частности, инженеры хотят встроить камеры бокового и верхнего обзора для большей аккуратности позиционирования.
Голономный робот в принципе — это устройство, которое может двигаться в любом направлении на плоскости без необходимости предварительно разворачиваться. Простыми словами, он может ехать вперед, назад, вбок и вращаться на месте, как угодно, благодаря специальным механизмам. Представим себе машинку на радиоуправлении, которая может мгновенно поехать вбок, не разворачиваясь, — это и есть голономный робот. Такие роботы часто используются там, где нужна высокая манёвренность, например, для решения задач складской логистики.
HB-3 рассчитан на то, чтобы удовлетворить возрастающую потребность в точных манипуляциях среди различных отраслей, включая автоматизацию лабораторий, медпроцедуры и научные исследования. Устройство было бы полезно при работе и с наноматериалами, и с клетками живых тканей, и при сборке микросхем, в общем, там, где присутствие человека нежелательно либо просто невозможно. Особенно актуально это в вакуумных средах, в особо чистых помещениях, в биозащищённых камерах и так далее.
HB-3 создан по примеру анатомии и двигательных способностей жука-носорога, сочетая в себе пьезоэлектрические приводы с автономной технологией, позволяющей осуществлять микроскопические манипуляции.
Пьезоэлектрические приводы — это устройства, которые преобразуют электрическую энергию в механическое движение с помощью пьезоэлектрического эффекта. Простыми словами, это такие «двигатели», которые работают за счёт специальных материалов (пьезоэлектриков), немного изменяющих свою форму, когда к ним прикладывают электрическое напряжение. Пьезоэлектриками служат, например, кварц или керамика, которые сжимаются или расширяются, когда на них подают электроток. Происходящие крошечные движения используются для точного и контролируемого перемещения в пространстве.
За последние годы автономные роботы стали использоваться в различных отраслях промышленности, на местах стихийных бедствий, в медицине и в замкнутых пространствах, куда нет доступа людям. В то же время полным ходом идёт миниатюризация электронных составляющих и для таких устройств в том числе. Так, специалисты работают над созданием микроскопических узлов в виде батарей и суперконденсаторов толщиной всего в несколько микрон.
Обычные устройства описанного выше предназначения оставались громоздкими и тяжёлыми по сравнению с уже появившимися на рынке крошечными деталями. В общем, оставалось много возможностей для совершенствования роботизированной электроники с точки зрения энергоэффективности и экономии места. Даже если бы управляющие схемы и аккумуляторы стали предельно крошечными, их диапазон и свобода действий всё равно были бы сильно ограничены несоответствием прочих компонентов.
Для решения таких задач различные специалисты придумывали всяческие прецизионные (высокоточные) приводы — по сути, «мышцы» робота, которые преобразуют электрическую, гидравлическую или пневматическую энергию в движение. В частности, как очень перспективные для таких целей проявили себя пьезоэлектрические приводы.
Наблюдается общая тенденция к созданию всё более миниатюрных роботов и соответственно маленьких захватов-манипуляторов. Однако до сих пор не удавалось построить передвижные манипуляторы, которые бы выполняли операции на мирокуровне и при этом объединяли бы в себе пьезоэлектрические приводные технологии, были бы автономными и применимыми в реальных условиях.
Конструкция HB-3 получилась компактной и лёгкой — массой всего 515 граммов и 10 куб. см в объёме. Интегрированная схема управления на базе одноплатного компьютера устранила проблемы, которые возникали в предшествующих исследованиях тех же робототехников из-за электропроводов. HB-3 также оснащён встроенной камерой и выполняет задачи с помощью алгоритмов машинного обучения, которые позволяют ему без малейших промедлений корректировать движения. Следует отметить, что последняя функция отсутствует в предыдущих манипуляторах такого уровня.
В ходе дотошных испытаний HB-3 показал впечатляющие результаты при выполнении задач в тесном пространстве с использованием различных инструментов. Например, робот функционировал как точный пинцет для захвата и размещения микросхем или инжектор (подающий элемент) для нанесения крошечных капель. При этом точность была в пределах десятых и сотых долей миллиметра, а 87% задач были выполнены успешно.
Изобретатели утверждают, что на базе HB-3 можно создать различные прецизионные инструменты: измерительные щупы, паяльники, отвёртки и другие очень точные приспособления по мере необходимости и в различных масштабах — от метра до нанометра.
Один из разработчиков компактной машины Оми Футиваки, доцент инженерного факультета, заявил, что они с коллегами смогли повысить миниатюрность, чтобы воплотить в реальность не привязанное к чему-либо устройство для работ в тесных и опасных пространствах.
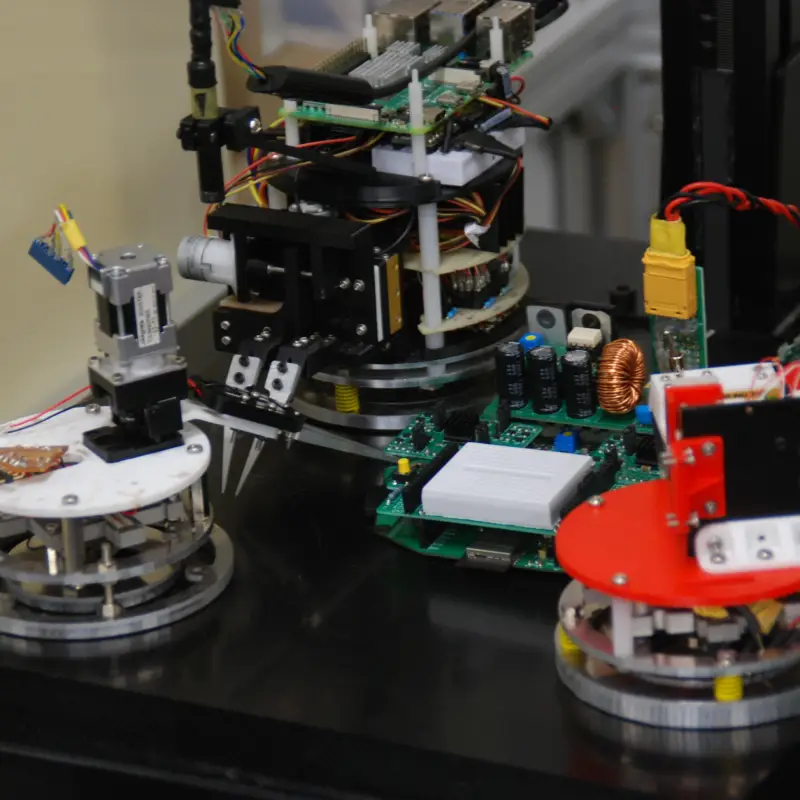
HB-3 может не только выполнять сложные задачи, но и делать это с непревзойдённой точностью
— Футиваки.
Инженеры из Йокогамы планируют доработать своего маленького «жука». Они считают, что скорость обработки данных HB-3, зависящую от процессора Raspberry Pi, можно увеличить. А время, которое требуется роботу для обнаружения объектов, удастся сократить за счёт передачи функции по обнаружению целей на внешний высокопроизводительный компьютер.
В дальнейшем исследователи также планируют повысить скорость и точность робота. В частности, инженеры хотят встроить камеры бокового и верхнего обзора для большей аккуратности позиционирования.
- Дмитрий Ладыгин
- advanced.onlinelibrary.wiley.com; fuchilab.ynu.ac.jp
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Искали золото в Австралии, а обнаружили следы взрыва тысяч атомных бомб
Почему находка древней катастрофы сильно продвинуло исследование Марса?...

5000 лет исторической тайны: кто жил на Дону до славян, рассказали археологи
95 образцов, 11 курганов, 10 стоянок полностью переписали прежнюю хронологию...

Если высохнет Каспий: почему это особенно опасно для России?
Прогнозы пугают: уникальное море-озеро может уменьшиться почти на 40%. И это катастрофа...

Третий сын Сталина: родство подтвердил уникальный документ из Красноярского архива
Будущий вождь обещал жениться, но судьба и история оказались против этого брака...

Секреты «русского гена»: о чем молчит гаплогруппа R1a1?
67 общих маркеров ДНК: половина современных русских мужчин и две трети мужчин из высших каст Северной Индии происходят от одного предка. И не только......

Гениально, многоэтажно и смертельно опасно: как римляне научились строить высотные дома
Почему реальный Древний Рим выглядел вообще не так, как нам показывают в исторических фильмах?...

Почему индейцы — родственники россиян: что нашли в ДНК коренных американцев?
Как связан древний мальчик с Байкала с племенем в Амазонии? Какой подарок от древних людей помог заселить Америку?...

Непотушенный окурок взорвал целый город: чудовищная катастрофа и чудовищная ложь в США
Почему власти десятилетиями умалчивали истинную причину самого мощного техногенного ЧП в истории Штатов?...

Первый раз настоящий сахар нашли в космосе: почему ученые в восторге?
Чем космический сахар отличается от земного? И почему биологи говорят, что это сенсация?...

Тайный алтарь на развалинах мертвого города майя обнаружили археологи
Выяснилось, что индейцы долгие столетия продолжали исповедовать, казалось бы, давно забытый древний культ...