
Для лунной программы: робот из Манчестера сможет подпрыгнуть на 200 метров
Специалисты из Манчестерского университета, Великобритания, изобрели робота, способного устремиться вверх на 120 метров — выше, чем любой другой робот-прыгун, созданный на сегодняшний день.
Сочетая математику, компьютерное моделирование и эксперименты в лаборатории, исследователи поняли, как спроектировать робота, прыгающего так высоко, чтобы преодолевать препятствия, во много раз превышающие его собственные размеры.
Уже сегодня манчестерский робот-рекордсмен по прыжкам может достигать 33 м в высоту, что в 110 раз больше его собственного размера. Это значит, что инженеры изобрели робота, который сможет при определённом типоразмере подскочить в условиях Луны на 200 м.
Изобретение имеет важное практическое значение. Его авторы убеждены, что их прыгун произведёт революцию во многих сферах: при исследовании планет, спасательных работах во время стихийных бедствиях и послужит для наблюдения за опасными или недоступными местами.
Соавтор проекта — Джон Ло, сотрудник отдела космической робототехники, прокомментировал, что роботов прежде создавали ездящими на колёсах или шагающими. Однако прыжки обеспечат эффективный способ передвижения в районах, где местность очень неровная, с множеством препятствий, будь то пещеры, леса, пустоши с валунами или даже крайне пересечённая поверхность других планет.
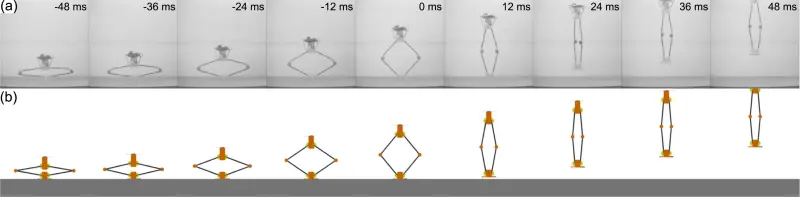
Исследователи обнаружили, что роботы-прыгуны часто норовили «вспорхнуть» до того, как полностью высвободят накопленную энергию пружины. Такой фальстарт приводил к неэффективности прыжков и ограничивал набор высоты. Стало понятно, что многие модели прыгучих устройств тратили «запал» впустую, двигаясь из стороны в сторону или вращаясь. Но с точки зрения расходования энергии выгоднее всего было бы стремиться исключительно вверх. Так возникла идея, что новую конструкцию нужно избавить от любой излишней подвижности при сохранении надёжности.
Соавтор изобретения Бен Парслью рассказал, что они перебрали множество форм-факторов для будущего устройства, а также размышляли о размере создаваемого робота. Да, маленькие роботы были бы лёгкими и маневренными, зато по мере укрупнения их можно оснастить двигателями для более мощных прыжков.
В итоге решили перераспределить массу к верху и сузить конструкцию к низу. Более лёгкое основание в форме призмы с пружинами в придачу стало тем решением, которое улучшило производительность и, самое главное, энергоэффективность прыгающего робота.
Так исследователи нашли практичный вариант конструкции, позволяющий значительно улучшить производительность. Но следом возникла очередная цель — взять под контроль направление прыжков и использовать кинетическую энергию при приземлении, чтобы увеличить количество прыжков, совершаемых за один раз.
Инженеры также изучат более компактные конструкции для космических полётов, чтобы робота можно было отправить на Луну и дать ему шанс достичь там неземных рекордов.
Сочетая математику, компьютерное моделирование и эксперименты в лаборатории, исследователи поняли, как спроектировать робота, прыгающего так высоко, чтобы преодолевать препятствия, во много раз превышающие его собственные размеры.
Уже сегодня манчестерский робот-рекордсмен по прыжкам может достигать 33 м в высоту, что в 110 раз больше его собственного размера. Это значит, что инженеры изобрели робота, который сможет при определённом типоразмере подскочить в условиях Луны на 200 м.
Изобретение имеет важное практическое значение. Его авторы убеждены, что их прыгун произведёт революцию во многих сферах: при исследовании планет, спасательных работах во время стихийных бедствиях и послужит для наблюдения за опасными или недоступными местами.
Соавтор проекта — Джон Ло, сотрудник отдела космической робототехники, прокомментировал, что роботов прежде создавали ездящими на колёсах или шагающими. Однако прыжки обеспечат эффективный способ передвижения в районах, где местность очень неровная, с множеством препятствий, будь то пещеры, леса, пустоши с валунами или даже крайне пересечённая поверхность других планет.
Исследователи обнаружили, что роботы-прыгуны часто норовили «вспорхнуть» до того, как полностью высвободят накопленную энергию пружины. Такой фальстарт приводил к неэффективности прыжков и ограничивал набор высоты. Стало понятно, что многие модели прыгучих устройств тратили «запал» впустую, двигаясь из стороны в сторону или вращаясь. Но с точки зрения расходования энергии выгоднее всего было бы стремиться исключительно вверх. Так возникла идея, что новую конструкцию нужно избавить от любой излишней подвижности при сохранении надёжности.
Соавтор изобретения Бен Парслью рассказал, что они перебрали множество форм-факторов для будущего устройства, а также размышляли о размере создаваемого робота. Да, маленькие роботы были бы лёгкими и маневренными, зато по мере укрупнения их можно оснастить двигателями для более мощных прыжков.
В итоге решили перераспределить массу к верху и сузить конструкцию к низу. Более лёгкое основание в форме призмы с пружинами в придачу стало тем решением, которое улучшило производительность и, самое главное, энергоэффективность прыгающего робота.
Так исследователи нашли практичный вариант конструкции, позволяющий значительно улучшить производительность. Но следом возникла очередная цель — взять под контроль направление прыжков и использовать кинетическую энергию при приземлении, чтобы увеличить количество прыжков, совершаемых за один раз.
Инженеры также изучат более компактные конструкции для космических полётов, чтобы робота можно было отправить на Луну и дать ему шанс достичь там неземных рекордов.
- Дмитрий Ладыгин
- sciencedirect.com
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Битва под Каневом: почему на 350 лет замолчали сокрушительную победу России?
Неудобная победа, предательство и идеология. Мы бы могли вообще не узнать об этом триумфе русского оружия...

Бомбы с орбиты: почему советская технология, воскрешенная Китаем, встревожила США?
Американцы слишком долго считали свои системы раннего предупреждения лучшими на планете. Теперь......

С Ноева ковчега сняли запрет: что покажут радары на Арарате?
История, которую больше всего высмеивали ученые, неожиданно становится все более реальной...

Дикий народ чучуна: Кто наводил ужас на коренное население Сибири?
Йети? Люди-изгои? Древнее племя? Пока что вопросов больше, чем ответов...

Почему их ДНК не меняется уже 42 000 лет: определен самый древний народ на планете
Три раза предки жителей Океании встречались с исчезнувшими видами людей, и это в корне изменило их гены...

Тайна «косого глаза» Венеры раскрыта: что увидела нейросеть на картинах Боттичелли?
Художник нарисовал пять портретов прекрасной Симонетты Веспуччи. И каждое полотно еще больше подтверждает страшный диагноз...

Мрачный прогноз для США из 1995 года сбылся: в чем великий ученый Саган оказался прав?
Исследователь говорил: все плохо, но еще не все потеряно. Его советы могут реально помочь всему человечеству...

Новая вселенная внутри звезды: почему Эйнштейн мог ошибаться насчет черных дыр
Больше 20 лет эта гипотеза в буквальном смысле раздирает мир науки. Но, возможно, именно она выведет ученых из тупика сингулярности...

Прорыв в астрономии: найти жизнь в космосе будет гораздо проще
Ученых не пугает даже погрешность в 20%. Зато будут просканированы тысячи планет...

Марс под вопросом: что может обнулить иммунитет у космонавтов?
И почему защита организма перестает видеть микробы, выжившие в космосе?...

Снегопады в Антарктиде становятся все аномальнее: и ученые, наконец-то, знают почему?
Ученым придется пересмотреть все климатические модели Шестого континента. Кстати, снега там будет выпадать с каждым годом все больше...

43 — проклятый возраст Рюриковичей: почему многие князья не переживали этот роковой рубеж?
Генетики говорят: русская династия слишком поздно поняла, что попала в ловушку «чистой» крови...

Тайный Еще одна тайна майя: археологи секрет алтаря в заброшенном городе
Выяснилось, что индейцы долгие столетия продолжали исповедовать, казалось бы, давно забытый древний культ...

Доказана жизнь на спутнике Юпитера: как же бактериям удалось добраться с Земли на Европу?
За 3,5 миллиарда лет земные бактерии могли долететь до 105 звездных систем. Так что у Европы есть все шансы на «заражение»...

Сначала Стоунхендж был... не каменным: найден прототип легендарного святилища
Доисторическая религия оказалась старше на 500 лет, чем считали ученые. И она играла огромную роль в жизни древних людей...

Бельгийскую разведку снова взломали: хакеры целый год качали оттуда секретные данные
Эксперты говорят: проникновение было замечено совершенно случайно. И это пугает...