
Человекоподобного робота научили рисовать
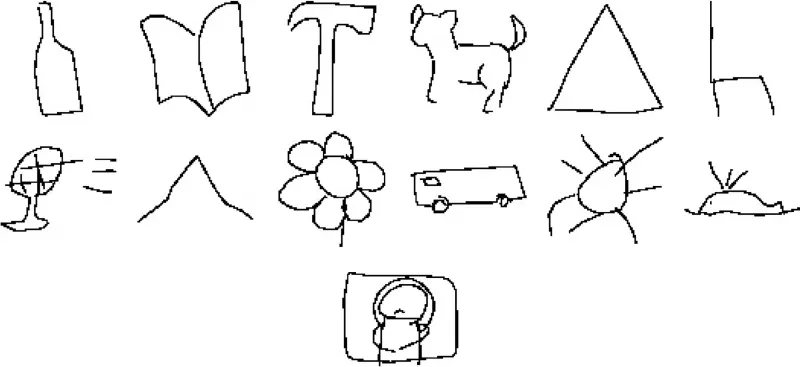
Большая часть изображений, созданных искусственным интеллектом (ИИ), генерируется алгоритмами и вычислительными моделями. И большинство роботизированных систем для создания эскизов или картин, по сути, работают как принтеры. Они, как правило, воспроизводят изображения, которые им передал после генерирования алгоритм ИИ. Гораздо реже физический карандаш или фломастер вкладывают в манипулятор осязаемого робота, и тот рисует буквально. Именно этим и пришлось заняться роботу-гуманоиду из Испании.
Специалисты из двух вузов, UCM и UC3M, разработали компьютерную модель, основанную на глубоком обучении. Её цель — позволить роботу рисовать подобно человеку. Статью о достижении опубликовали в издании Cognitive Systems Research. Соавтор проекта Рауль Фернандес-Фернандес рассказал, что идея их коллектива состояла в создании рисунков именно «рукой» машины.
Фернандес-Фернандес и его коллеги несколько лет посвятили разработке эффективных алгоритмов для планирования действий «творческих» роботов. Достигнутый в итоге успех основан на двух предыдущих проектах этой же команды испанских робототехников. Первый из них — исследование программного обеспечения «Quick Draw! Dataset», предназначенного для обучения роботов-художников. Вторую работу они посвятили ранее глубокому обучению устройств, в которые пытались вложить сложные функции, в том числе «осознание» эмоций.
Новая роботизированная система начертания эскизов основана на фреймворке глубокого обучения. Фернандес-Фернандес и его коллеги усовершенствовали смежную разработку другой команды исследователей, чтобы тщательно планировать действия роботов, позволяя им выполнять сложные ручные задачи в широком диапазоне сред.
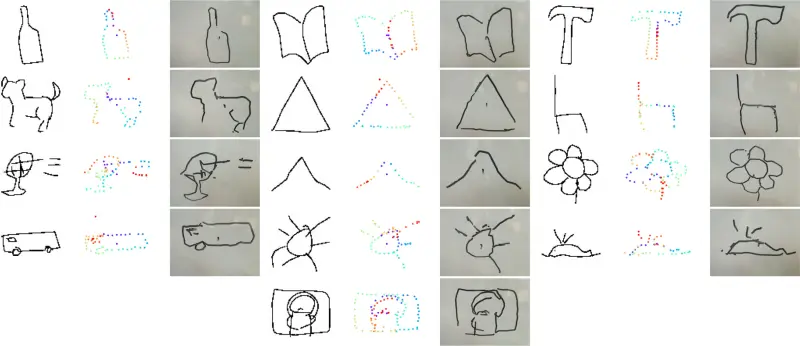
Фернандес-Фернандес объяснил, что нейронная сеть разделена на три части, которые можно рассматривать как три разные, но взаимосвязанные, сети. Главная из них работает с высокоуровневыми элементами всего изображения. Локальная сеть извлекает низкоуровневые элементы вокруг. И выходная сеть принимает в качестве вводных данных объекты, извлечённые из главной и локальной сетей для рисования.
Фернандес-Фернандес и его сотрудники также заливали данные в свою модель по двум дополнительным каналам, которые предоставляют информацию о расстояниях и о положении инструмента относительно холста. В совокупности все эти функции помогли обучить собственную сеть, улучшив её навыки создания эскизов. Чтобы ещё больше приблизить графические способности к человеческим, исследователи также внедрили этап предварительной подготовки, основанный на так называемом генераторе случайных штрихов.
На пути к созданию эскизов с помощью физического робота исследователям пришлось также разработать стратегию преобразования расстояний и положений на изображениях, сгенерированных ИИ, на холст в реальном мире. Для достижения этой цели они создали виртуальное пространство внутри физического холста, в пределах которого робот мог перемещаться и непосредственно интерпретировать координаты рисунка, заданные моделью.
Фернандес-Фернандес отметил, что в своей работе исследователи убедились, что этап управления приложениями для рисования роботов может быть улучшен благодаря алгоритмам.
И добавил, что они с коллегами надеются, что их модель вдохновит других на дальнейшие исследования.
Специалисты из двух вузов, UCM и UC3M, разработали компьютерную модель, основанную на глубоком обучении. Её цель — позволить роботу рисовать подобно человеку. Статью о достижении опубликовали в издании Cognitive Systems Research. Соавтор проекта Рауль Фернандес-Фернандес рассказал, что идея их коллектива состояла в создании рисунков именно «рукой» машины.
Фернандес-Фернандес и его коллеги несколько лет посвятили разработке эффективных алгоритмов для планирования действий «творческих» роботов. Достигнутый в итоге успех основан на двух предыдущих проектах этой же команды испанских робототехников. Первый из них — исследование программного обеспечения «Quick Draw! Dataset», предназначенного для обучения роботов-художников. Вторую работу они посвятили ранее глубокому обучению устройств, в которые пытались вложить сложные функции, в том числе «осознание» эмоций.
Новая роботизированная система начертания эскизов основана на фреймворке глубокого обучения. Фернандес-Фернандес и его коллеги усовершенствовали смежную разработку другой команды исследователей, чтобы тщательно планировать действия роботов, позволяя им выполнять сложные ручные задачи в широком диапазоне сред.
Фернандес-Фернандес объяснил, что нейронная сеть разделена на три части, которые можно рассматривать как три разные, но взаимосвязанные, сети. Главная из них работает с высокоуровневыми элементами всего изображения. Локальная сеть извлекает низкоуровневые элементы вокруг. И выходная сеть принимает в качестве вводных данных объекты, извлечённые из главной и локальной сетей для рисования.
Фернандес-Фернандес и его сотрудники также заливали данные в свою модель по двум дополнительным каналам, которые предоставляют информацию о расстояниях и о положении инструмента относительно холста. В совокупности все эти функции помогли обучить собственную сеть, улучшив её навыки создания эскизов. Чтобы ещё больше приблизить графические способности к человеческим, исследователи также внедрили этап предварительной подготовки, основанный на так называемом генераторе случайных штрихов.
На пути к созданию эскизов с помощью физического робота исследователям пришлось также разработать стратегию преобразования расстояний и положений на изображениях, сгенерированных ИИ, на холст в реальном мире. Для достижения этой цели они создали виртуальное пространство внутри физического холста, в пределах которого робот мог перемещаться и непосредственно интерпретировать координаты рисунка, заданные моделью.
Фернандес-Фернандес отметил, что в своей работе исследователи убедились, что этап управления приложениями для рисования роботов может быть улучшен благодаря алгоритмам.
И добавил, что они с коллегами надеются, что их модель вдохновит других на дальнейшие исследования.
- Дмитрий Ладыгин
- sciencedirect.com
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Битва под Каневом: почему на 350 лет замолчали сокрушительную победу России?
Неудобная победа, предательство и идеология. Мы бы могли вообще не узнать об этом триумфе русского оружия...

Бомбы с орбиты: почему советская технология, воскрешенная Китаем, встревожила США?
Американцы слишком долго считали свои системы раннего предупреждения лучшими на планете. Теперь......

С Ноева ковчега сняли запрет: что покажут радары на Арарате?
История, которую больше всего высмеивали ученые, неожиданно становится все более реальной...

Дикий народ чучуна: Кто наводил ужас на коренное население Сибири?
Йети? Люди-изгои? Древнее племя? Пока что вопросов больше, чем ответов...

Почему их ДНК не меняется уже 42 000 лет: определен самый древний народ на планете
Три раза предки жителей Океании встречались с исчезнувшими видами людей, и это в корне изменило их гены...

Тайна «косого глаза» Венеры раскрыта: что увидела нейросеть на картинах Боттичелли?
Художник нарисовал пять портретов прекрасной Симонетты Веспуччи. И каждое полотно еще больше подтверждает страшный диагноз...

Мрачный прогноз для США из 1995 года сбылся: в чем великий ученый Саган оказался прав?
Исследователь говорил: все плохо, но еще не все потеряно. Его советы могут реально помочь всему человечеству...

Новая вселенная внутри звезды: почему Эйнштейн мог ошибаться насчет черных дыр
Больше 20 лет эта гипотеза в буквальном смысле раздирает мир науки. Но, возможно, именно она выведет ученых из тупика сингулярности...

Прорыв в астрономии: найти жизнь в космосе будет гораздо проще
Ученых не пугает даже погрешность в 20%. Зато будут просканированы тысячи планет...

Марс под вопросом: что может обнулить иммунитет у космонавтов?
И почему защита организма перестает видеть микробы, выжившие в космосе?...

Снегопады в Антарктиде становятся все аномальнее: и ученые, наконец-то, знают почему?
Ученым придется пересмотреть все климатические модели Шестого континента. Кстати, снега там будет выпадать с каждым годом все больше...

43 — проклятый возраст Рюриковичей: почему многие князья не переживали этот роковой рубеж?
Генетики говорят: русская династия слишком поздно поняла, что попала в ловушку «чистой» крови...

Тайный Еще одна тайна майя: археологи секрет алтаря в заброшенном городе
Выяснилось, что индейцы долгие столетия продолжали исповедовать, казалось бы, давно забытый древний культ...

Доказана жизнь на спутнике Юпитера: как же бактериям удалось добраться с Земли на Европу?
За 3,5 миллиарда лет земные бактерии могли долететь до 105 звездных систем. Так что у Европы есть все шансы на «заражение»...

Сначала Стоунхендж был... не каменным: найден прототип легендарного святилища
Доисторическая религия оказалась старше на 500 лет, чем считали ученые. И она играла огромную роль в жизни древних людей...

Бельгийскую разведку снова взломали: хакеры целый год качали оттуда секретные данные
Эксперты говорят: проникновение было замечено совершенно случайно. И это пугает...