
«Человеческая» нервная система успешно «рулит» целым роем роботов
Группы слаженно двигающихся роботов часто называют роями, по аналогии с пчёлами. Создание таких роёв привлекает робототехников, так как обещает на практике повышенную скорость и эффективность. А это крайне важно, когда, например, нужно спасти пострадавших от стихийных бедствий или вести мониторинг территорий после аварии на химическом производстве.
Исследователи из Свободного университета Брюсселя (ULB) разработали для этого фреймворк, то есть программную платформу, которая определяет организацию роботов. Новую роевую архитектуру создавали по примеру нервной системой человека с целью улучшить взаимодействие между роботами. Эксперименты с новыми алгоритмами показали, что роботы благодаря им организуются в подгруппы. И это улучшает координацию, когда вся группа исследует окружающую среду, перемещается или планирует дальнейшие действия.
— Мэри Кэтрин Генрих, сотрудница лаборатории искусственного интеллекта в ULB.
Связана такая заминка с тем, что у методов самоорганизации машин остаются существенные недостатки. Очень непросто запрограммированного индивидуально робота объединить с другими устройствами в слаженную эффективную группу.
Суть новой платформы — в создании и восстановлении самоорганизующихся иерархий. Иначе говоря, придуманный в ULB фреймворк помогает роботам самостоятельно сплачиваться в сеть с динамическим (переменчивым) управлением. Создатели назвали своё достижение самоорганизующейся нервной системой (SoNS).
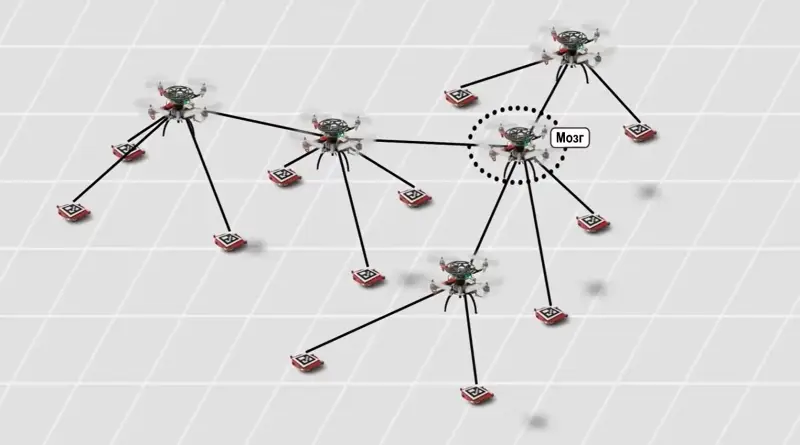
При объединении в сеть роботы временно и по очереди берут на себя определённые задачи в непостоянной иерархии руководства, схожей с подчинённостью элементов в человеческой нервной системе. Верховное звено в роевой иерархии — «мозг», который контролирует группу во время задания.
Генрих пояснила, что в сети SoNS каждое устройство вступает во взаимодействие лишь с ближайшими роботами. И это позволяет избежать недостатков, которые возможны при централизации.
По мере необходимости пакеты информации с датчиков могут объединяться для передачи вверх по иерархии. А если смотреть сверху вниз, от «мозга» к остальным составляющим, то руководящие сообщения могут разделяться по мере передачи «вниз по течению». При этом равновесие между индивидуальным и коллективным типами поведения способно активно отлаживаться.
Роевая архитектура SoNS действует как своего рода «промежуточное программное обеспечение» для роботов. При этом алгоритмы «организации труда» позволяют отдельным устройствам объединяться в динамические иерархии. В складывающейся по мере необходимости сети роботы могут оптимально задействовать свои возможности ради успеха поставленной задачи.
— профессор Марко Дориго, ULB.
Генрих и Дориго с другими коллегами протестировали своё ПО сначала в компьютерной симуляции с 250 летающими коптерами и наземными роботами, а затем в экспериментах с реальными устройствами. Результаты опытов подтвердили: с новым подходом удаётся координировать действия множества машин ещё эффективнее.
Разработчики верят, что их достижение в итоге улучшит применение робототехнических роёв в реальных условиях.
Исследователи из Свободного университета Брюсселя (ULB) разработали для этого фреймворк, то есть программную платформу, которая определяет организацию роботов. Новую роевую архитектуру создавали по примеру нервной системой человека с целью улучшить взаимодействие между роботами. Эксперименты с новыми алгоритмами показали, что роботы благодаря им организуются в подгруппы. И это улучшает координацию, когда вся группа исследует окружающую среду, перемещается или планирует дальнейшие действия.
За последние пару десятилетий роевая робототехника далеко продвинулась в организации коллективных действий без центрального «мозга». Однако пока рои роботов ещё не начали широко применять в реальных ситуациях
— Мэри Кэтрин Генрих, сотрудница лаборатории искусственного интеллекта в ULB.
Связана такая заминка с тем, что у методов самоорганизации машин остаются существенные недостатки. Очень непросто запрограммированного индивидуально робота объединить с другими устройствами в слаженную эффективную группу.
Суть новой платформы — в создании и восстановлении самоорганизующихся иерархий. Иначе говоря, придуманный в ULB фреймворк помогает роботам самостоятельно сплачиваться в сеть с динамическим (переменчивым) управлением. Создатели назвали своё достижение самоорганизующейся нервной системой (SoNS).
При объединении в сеть роботы временно и по очереди берут на себя определённые задачи в непостоянной иерархии руководства, схожей с подчинённостью элементов в человеческой нервной системе. Верховное звено в роевой иерархии — «мозг», который контролирует группу во время задания.
Генрих пояснила, что в сети SoNS каждое устройство вступает во взаимодействие лишь с ближайшими роботами. И это позволяет избежать недостатков, которые возможны при централизации.
По мере необходимости пакеты информации с датчиков могут объединяться для передачи вверх по иерархии. А если смотреть сверху вниз, от «мозга» к остальным составляющим, то руководящие сообщения могут разделяться по мере передачи «вниз по течению». При этом равновесие между индивидуальным и коллективным типами поведения способно активно отлаживаться.
Роевая архитектура SoNS действует как своего рода «промежуточное программное обеспечение» для роботов. При этом алгоритмы «организации труда» позволяют отдельным устройствам объединяться в динамические иерархии. В складывающейся по мере необходимости сети роботы могут оптимально задействовать свои возможности ради успеха поставленной задачи.
На основе SoNS у роботов получается координировать коллективные действия для сбора данных, запуска механизмов и принятия решений, не жертвуя гибкостью и стабильностью всего роя.
Иначе говоря, архитектура SoNS даёт возможность программировать группу устройств как всего лишь одного робота
Иначе говоря, архитектура SoNS даёт возможность программировать группу устройств как всего лишь одного робота
— профессор Марко Дориго, ULB.
Генрих и Дориго с другими коллегами протестировали своё ПО сначала в компьютерной симуляции с 250 летающими коптерами и наземными роботами, а затем в экспериментах с реальными устройствами. Результаты опытов подтвердили: с новым подходом удаётся координировать действия множества машин ещё эффективнее.
Разработчики верят, что их достижение в итоге улучшит применение робототехнических роёв в реальных условиях.
- Дмитрий Ладыгин
- science.org
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Битва под Каневом: почему на 350 лет замолчали сокрушительную победу России?
Неудобная победа, предательство и идеология. Мы бы могли вообще не узнать об этом триумфе русского оружия...

Бомбы с орбиты: почему советская технология, воскрешенная Китаем, встревожила США?
Американцы слишком долго считали свои системы раннего предупреждения лучшими на планете. Теперь......

С Ноева ковчега сняли запрет: что покажут радары на Арарате?
История, которую больше всего высмеивали ученые, неожиданно становится все более реальной...

Дикий народ чучуна: Кто наводил ужас на коренное население Сибири?
Йети? Люди-изгои? Древнее племя? Пока что вопросов больше, чем ответов...

Почему их ДНК не меняется уже 42 000 лет: определен самый древний народ на планете
Три раза предки жителей Океании встречались с исчезнувшими видами людей, и это в корне изменило их гены...

Тайна «косого глаза» Венеры раскрыта: что увидела нейросеть на картинах Боттичелли?
Художник нарисовал пять портретов прекрасной Симонетты Веспуччи. И каждое полотно еще больше подтверждает страшный диагноз...

Мрачный прогноз для США из 1995 года сбылся: в чем великий ученый Саган оказался прав?
Исследователь говорил: все плохо, но еще не все потеряно. Его советы могут реально помочь всему человечеству...

Новая вселенная внутри звезды: почему Эйнштейн мог ошибаться насчет черных дыр
Больше 20 лет эта гипотеза в буквальном смысле раздирает мир науки. Но, возможно, именно она выведет ученых из тупика сингулярности...

Прорыв в астрономии: найти жизнь в космосе будет гораздо проще
Ученых не пугает даже погрешность в 20%. Зато будут просканированы тысячи планет...

Марс под вопросом: что может обнулить иммунитет у космонавтов?
И почему защита организма перестает видеть микробы, выжившие в космосе?...

Снегопады в Антарктиде становятся все аномальнее: и ученые, наконец-то, знают почему?
Ученым придется пересмотреть все климатические модели Шестого континента. Кстати, снега там будет выпадать с каждым годом все больше...

43 — проклятый возраст Рюриковичей: почему многие князья не переживали этот роковой рубеж?
Генетики говорят: русская династия слишком поздно поняла, что попала в ловушку «чистой» крови...

Тайный Еще одна тайна майя: археологи секрет алтаря в заброшенном городе
Выяснилось, что индейцы долгие столетия продолжали исповедовать, казалось бы, давно забытый древний культ...

Доказана жизнь на спутнике Юпитера: как же бактериям удалось добраться с Земли на Европу?
За 3,5 миллиарда лет земные бактерии могли долететь до 105 звездных систем. Так что у Европы есть все шансы на «заражение»...

Сначала Стоунхендж был... не каменным: найден прототип легендарного святилища
Доисторическая религия оказалась старше на 500 лет, чем считали ученые. И она играла огромную роль в жизни древних людей...

Бельгийскую разведку снова взломали: хакеры целый год качали оттуда секретные данные
Эксперты говорят: проникновение было замечено совершенно случайно. И это пугает...