
Нога для робота с искусственными мышцами обскакала механические конечности
Роботов создают уже почти 70 лет. На сегодняшний день все механизмы этого класса имеют одну общую черту: они приводятся в действие двигателями, придуманными ещё 200 лет назад. Даже у шагающих роботов руки и ноги работают не благодаря мышцам, как у людей и животных. Это отчасти объясняет, почему устройствам не хватает мобильности и приспособляемости к среде.
Принципиально иную робототехническую ногу изобрели совместно специалисты из Швейцарии (ETH Zurich) и Германии (Институт Макса Планка, MPI–IS). Благодаря мышечному принципу она оказалась энергоэффективнее, чем конечности прочей робототехники, а также способна выполнять быстрые высокие прыжки, обнаруживать препятствия и реагировать на них — и всё это без сложных датчиков. Электрогидравлические приводы к каркасу прикрепили аналогами сухожилий.
У людей и у животных мышца-разгибатель и мышца-сгибатель гарантируют движения в разных направлениях. Вот и швейцарская нога для робота способна на подобное. Приводы представляют собой заполненные маслом пакеты из пластика, похожие на пакетики для льда. Примерно половина каждого привода с обеих сторон покрыта чёрным составом-электродом из токопроводящего материала.
Участник проекта Томас Бюхнер объяснил, что как только на электроды подаётся напряжение, они притягиваются друг к другу из-за статического электричества. То есть действие основано на том же принципе, благодаря которому после трения о воздушный шарик волосы пристают к нему.
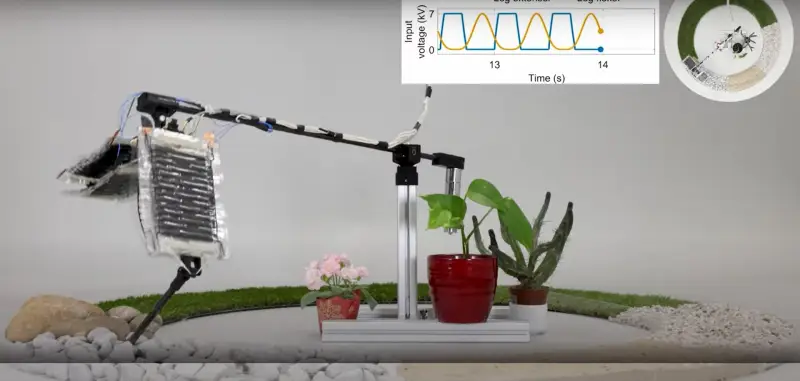
Если повысить напряжение, электроды сближаются и толкают масло в пакете в одну сторону, делая пакет в целом короче. В результате прикреплённые к каркасу приводы создают те же парные мышечные движения, что и у живых существ. Чтобы управлять сокращением пакетов, исследователи использовали для высоковольтных усилителей компьютерный код.
Инженеры сравнили энергоэффективность собранной роботизированной конечности с аналогичным показателем традиционной механической ноги, приводимой в действие электродвигателем. В том числе проанализировали, сколько энергии без пользы переходит в тепло.
Благодаря инфракрасной съёмке было видно, что моторизованной ноге нужно куда больше электроэнергии, например, если требуется удерживать согнутое положение. Температура в электрогидравлической ноге, напротив, остаётся прежней, рассказал Бюхнер. Это связано с тем, что искусственная мышца — процесс электростатический. Для объяснения опять-таки подходят наэлектризованные волосы, которые остаются притянутыми к воздушному шару довольно длительное время.
Коллега Бюхнера Тосихико Фукусима пояснил, что, как правило, роботы с электроприводом нуждаются в регулировании температуры, а это требует дополнительных радиаторов или вентиляторов. Когда механическим ногам приходится длительное время удерживать определённое положение, через двигатель постоянного тока происходят потери энергии в виде тепла. Напротив, искусственные мышцы, которые работают по принципу электростатики, остаются холодными, потому что через них не проходит ток при постоянной нагрузке.
Прыгучесть робототехнической ноги из Цюриха основана на её способности подбрасывать вверх собственный вес. Исследователи также доказали, как хорошо она адаптируется в процессе, что особенно важно для мягкой робототехники. Только в том случае, если опорно-двигательный узел достаточно эластичен, он может плавно и успешно функционировать на той или иной местности. Глава исследования из ETH Zurich Роберт Кацшманн пояснил, что у живых существ это работает точно так же. Например, сложно было бы шагнуть с бордюра на шоссе без возможности сгибать колени.
В отличие от системы на электродвигателях, требующей, чтобы датчики постоянно показывали угол наклона ноги робота, искусственная мышца адаптируется к условиям за счёт взаимодействия с окружающей средой. Она приводится в действие всего двумя сигналами: для сгибания и для разгибания сустава.
Фукусима объяснил, что приспособляемость к местности — важнейшее условие для подвижности. Например, когда мы приземляемся, подпрыгнув, то не думаем предварительно, насколько согнуть колени. Тот же принцип применим и к электрогидравлической ноге. При приземлении её сустав адаптивно смещается под наиболее подходящим углом в зависимости от характера поверхности внизу, то есть её твёрдости либо податливости.
Область исследований электрогидравлических приводов всё ещё молода, так как появилась всего около шести лет назад. Второй руководитель проекта Кристоф Кеплингер из MPI–IS рассказал, что в этой сфере наблюдается быстрый прогресс за счёт средств управления и машинного обучения. Напротив, в части роботизированного оборудования прогресс был медленнее. Кеплингер подчеркнул, что их с коллегами достижение доказывает потенциал для внедрения новых аппаратных концепций, в том числе — за счёт использования искусственных мышц.
Кацшманн добавил, что электрогидравлические приводы вряд ли пригодятся для крупной техники на стройплощадках. Но они обладают определёнными преимуществами по сравнению со стандартными электродвигателями. Это особенно заметно в таких узлах, как захваты, где движения должны зависеть от того, берёт ли рука-манипулятор мяч, яйцо или помидор.
Вместе с тем Кацшманн признал, что созданная новинка по сравнению с шагающими роботами с электродвигателями — это пока лишь демонстрация концепции, а не готовое к определённым задачам устройство. Пока что созданный образец — лишь прикреплённая к стержню нога, которая скачет по кругу. Но если снабдить электрогидравлическими конечностями четвероногого или человекоподобного робота, — возможно, это стало бы огромным успехом.
Принципиально иную робототехническую ногу изобрели совместно специалисты из Швейцарии (ETH Zurich) и Германии (Институт Макса Планка, MPI–IS). Благодаря мышечному принципу она оказалась энергоэффективнее, чем конечности прочей робототехники, а также способна выполнять быстрые высокие прыжки, обнаруживать препятствия и реагировать на них — и всё это без сложных датчиков. Электрогидравлические приводы к каркасу прикрепили аналогами сухожилий.
У людей и у животных мышца-разгибатель и мышца-сгибатель гарантируют движения в разных направлениях. Вот и швейцарская нога для робота способна на подобное. Приводы представляют собой заполненные маслом пакеты из пластика, похожие на пакетики для льда. Примерно половина каждого привода с обеих сторон покрыта чёрным составом-электродом из токопроводящего материала.
Участник проекта Томас Бюхнер объяснил, что как только на электроды подаётся напряжение, они притягиваются друг к другу из-за статического электричества. То есть действие основано на том же принципе, благодаря которому после трения о воздушный шарик волосы пристают к нему.
Если повысить напряжение, электроды сближаются и толкают масло в пакете в одну сторону, делая пакет в целом короче. В результате прикреплённые к каркасу приводы создают те же парные мышечные движения, что и у живых существ. Чтобы управлять сокращением пакетов, исследователи использовали для высоковольтных усилителей компьютерный код.
Инженеры сравнили энергоэффективность собранной роботизированной конечности с аналогичным показателем традиционной механической ноги, приводимой в действие электродвигателем. В том числе проанализировали, сколько энергии без пользы переходит в тепло.
Благодаря инфракрасной съёмке было видно, что моторизованной ноге нужно куда больше электроэнергии, например, если требуется удерживать согнутое положение. Температура в электрогидравлической ноге, напротив, остаётся прежней, рассказал Бюхнер. Это связано с тем, что искусственная мышца — процесс электростатический. Для объяснения опять-таки подходят наэлектризованные волосы, которые остаются притянутыми к воздушному шару довольно длительное время.
Коллега Бюхнера Тосихико Фукусима пояснил, что, как правило, роботы с электроприводом нуждаются в регулировании температуры, а это требует дополнительных радиаторов или вентиляторов. Когда механическим ногам приходится длительное время удерживать определённое положение, через двигатель постоянного тока происходят потери энергии в виде тепла. Напротив, искусственные мышцы, которые работают по принципу электростатики, остаются холодными, потому что через них не проходит ток при постоянной нагрузке.
Прыгучесть робототехнической ноги из Цюриха основана на её способности подбрасывать вверх собственный вес. Исследователи также доказали, как хорошо она адаптируется в процессе, что особенно важно для мягкой робототехники. Только в том случае, если опорно-двигательный узел достаточно эластичен, он может плавно и успешно функционировать на той или иной местности. Глава исследования из ETH Zurich Роберт Кацшманн пояснил, что у живых существ это работает точно так же. Например, сложно было бы шагнуть с бордюра на шоссе без возможности сгибать колени.
В отличие от системы на электродвигателях, требующей, чтобы датчики постоянно показывали угол наклона ноги робота, искусственная мышца адаптируется к условиям за счёт взаимодействия с окружающей средой. Она приводится в действие всего двумя сигналами: для сгибания и для разгибания сустава.
Фукусима объяснил, что приспособляемость к местности — важнейшее условие для подвижности. Например, когда мы приземляемся, подпрыгнув, то не думаем предварительно, насколько согнуть колени. Тот же принцип применим и к электрогидравлической ноге. При приземлении её сустав адаптивно смещается под наиболее подходящим углом в зависимости от характера поверхности внизу, то есть её твёрдости либо податливости.
Область исследований электрогидравлических приводов всё ещё молода, так как появилась всего около шести лет назад. Второй руководитель проекта Кристоф Кеплингер из MPI–IS рассказал, что в этой сфере наблюдается быстрый прогресс за счёт средств управления и машинного обучения. Напротив, в части роботизированного оборудования прогресс был медленнее. Кеплингер подчеркнул, что их с коллегами достижение доказывает потенциал для внедрения новых аппаратных концепций, в том числе — за счёт использования искусственных мышц.
Кацшманн добавил, что электрогидравлические приводы вряд ли пригодятся для крупной техники на стройплощадках. Но они обладают определёнными преимуществами по сравнению со стандартными электродвигателями. Это особенно заметно в таких узлах, как захваты, где движения должны зависеть от того, берёт ли рука-манипулятор мяч, яйцо или помидор.
Вместе с тем Кацшманн признал, что созданная новинка по сравнению с шагающими роботами с электродвигателями — это пока лишь демонстрация концепции, а не готовое к определённым задачам устройство. Пока что созданный образец — лишь прикреплённая к стержню нога, которая скачет по кругу. Но если снабдить электрогидравлическими конечностями четвероногого или человекоподобного робота, — возможно, это стало бы огромным успехом.
- Дмитрий Ладыгин
- youtu.be/fp7XPb0WVKo
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Конец 30-летней легенды: Эверест может лишиться одного из главных символов
Эксперты предупреждают индийское правительство: экспедиция будет крайне опасной и вряд ли закончится успехом. Почему?...

Феномен Великой Зеленой стены: за счет чего 66 миллиардов деревьев, высаженных Китаем, растут быстрее естественных лесов?
И почему ученые решили, что природные леса все-таки лучше рукотворных?...

Тайна золотого вулкана: почему гора в Антарктике извергает драгоценный металл?
Ученые уже 30 лет пытаются разгадать этот природный детектив. Что удалось узнать исследователям...

Тайну четырех черных яиц с 6000-метров глубины океана раскрыли японские ученые
Дно морей изучено гораздо хуже, чем поверхность Марса и Луны. Неудивительно, что исследователи постоянно делают открытия...

Проклятье 30 июня: почему в этот день произошло столько крупных катастроф?
Официально виновата погода, но изучение деталей до сих пор вызывает множество вопросов...

Секрет охоты на мамонтов открыт: ученые только что разрушили один из главных мифов древней истории
То, что наука считала исторической реконструкцией, оказалось обычным эпизодом из голливудского фильма...

Ученые «разжаловали» индонезийских хоббитов из умников: огнем не владели, подъедались за варанами
Что же заставило археологов переписать целый пласт древней истории?...

Аномальный дождь из рыбы: 150 лет ученые не могут объяснить эту тайну природы
Это явление официально считается неразгаданным феноменом и проходит в категории чудес и головной боли для науки...

Космический детектив: почему уникальную планету GJ 3378b никак не признают «второй Землей»?
Сами ученые призывают не торопиться с выводами, ведь истории с инопланетным объектом существует множество интересных нюансов...

316 лет на троих: ученые назвали три секрета феноменального долголетия сестер Нунес
Специалисты говорят: важно получить «хорошие гены», но еще важнее ими правильно распорядиться...

Серная кислота в небе: чем грозит пассажирам новый экологический проект?
Эксперты говорят: от этих планов вряд ли откажутся. Но есть ли у нас время, чтобы подготовиться?...