
Двух пальцев достаточно: упрощённый роботизированный захват оказался не хуже аналога кисти
В последние годы робототехники по всему миру придумали немало различных захватов, которые могут поднимать различные типы объектов и манипулировать ими, совершая заданные действия.
Несмотря на хорошую производительность, многие роботизированные системы с пальцами, подобные человеческим кистям рук, подразумевают использование передовых и дорогостоящих механизмов, а также соответственно сложного программного обеспечения (ПО). Но по мере создания энергоэффективных и экономичных роботов возникает вопрос: а должен ли манипулятор устройства быть похож на человеческую руку?
Исследователи из Университета Пердью и Массачусетского технологического института (MIT) недавно разработали более простой, но достаточно эффективный роботизированный захват. Испытания доказали, что новинка ловко манипулирует объектами, несмотря на меньшее количество так называемых степеней свободы.
Степень свободы — важная характеристика подвижных деталей механизмов. Так называют комбинацию независимых координат перемещения или вращения, полностью определяющую положение системы или тела. Иными словами, степень свободы — это количество плоскостей, в которых возможны движения.
Соавтор научной статьи об изобретении Ю Шэ объяснил, что роботизированные руки, похожие на человеческие, отличаются высокой производительностью и ловкостью. Однако они пропорционально сложны с точки зрения и программирования, и управления ими. Напротив, раздвижные захваты (почти что «ухваты») с единственной степенью свободы просты и в смысле ПО, и в управлении, но бедны возможностями для манипуляций. Вот почему команда исследователей решила сконструировать захват, устранив разрыв между крайностями в подходе к робототехническим манипуляторам.
Новый захват, разработанный Шэ и его коллегами, имеет пять степеней свободы. Его сравнительно несложная конструкция упрощает необходимое ПО, и вместе с тем концепт достаточно близок к возможностям человеческих рук. Помогают в этом сенсорные данные, записываемые встроенным визуально-тактильным датчиком. Новый захват, по сути, состоит из двух пальцев, прикрепленных к основанию.
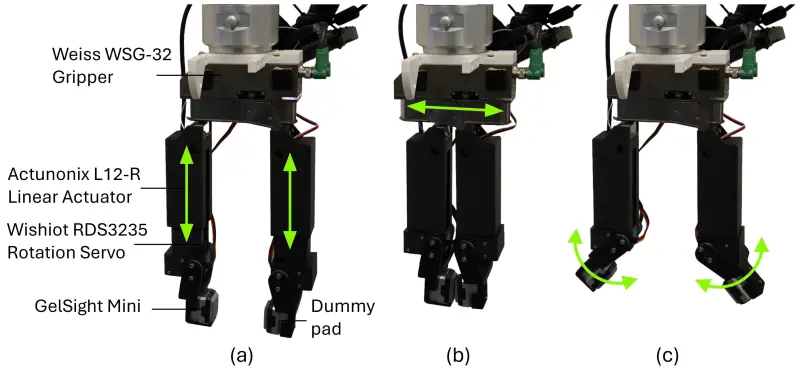
Основание захвата обеспечивает одно положение для закрывания и открывания, объяснил Шэ. Каждый палец оснащён линейным приводом и серводвигателем вращения, что обеспечивает в общей сложности пять оборотов. Пальцы захвата изготовлены методом 3D-печати из популярного для такого применения пластика PLA (полилактида). В кончике левого пальца руки — тактильный и одновременно визуальный датчик GelSight Mini, предоставляющий информацию о габаритах, ориентации и силе воздействия на захватываемый объект.
Исследователи оценили захват в череде экспериментов и обнаружили, что он превосходит базовые навыки манипулирования большинства простых захватов, у которых по несколько степеней свободы. Захват может эффективно выполнять два важных типа работы с объектами, известные как отделение и зачёрпывание. Например, он может имитировать движения человека, собирающего ракушки на пляже.
Роботизированный захват, представленный учёными, теперь совершенствуют для решения задач по манипулированию мягкими предметами.
Несмотря на хорошую производительность, многие роботизированные системы с пальцами, подобные человеческим кистям рук, подразумевают использование передовых и дорогостоящих механизмов, а также соответственно сложного программного обеспечения (ПО). Но по мере создания энергоэффективных и экономичных роботов возникает вопрос: а должен ли манипулятор устройства быть похож на человеческую руку?
Исследователи из Университета Пердью и Массачусетского технологического института (MIT) недавно разработали более простой, но достаточно эффективный роботизированный захват. Испытания доказали, что новинка ловко манипулирует объектами, несмотря на меньшее количество так называемых степеней свободы.
Степень свободы — важная характеристика подвижных деталей механизмов. Так называют комбинацию независимых координат перемещения или вращения, полностью определяющую положение системы или тела. Иными словами, степень свободы — это количество плоскостей, в которых возможны движения.
Соавтор научной статьи об изобретении Ю Шэ объяснил, что роботизированные руки, похожие на человеческие, отличаются высокой производительностью и ловкостью. Однако они пропорционально сложны с точки зрения и программирования, и управления ими. Напротив, раздвижные захваты (почти что «ухваты») с единственной степенью свободы просты и в смысле ПО, и в управлении, но бедны возможностями для манипуляций. Вот почему команда исследователей решила сконструировать захват, устранив разрыв между крайностями в подходе к робототехническим манипуляторам.
Новый захват, разработанный Шэ и его коллегами, имеет пять степеней свободы. Его сравнительно несложная конструкция упрощает необходимое ПО, и вместе с тем концепт достаточно близок к возможностям человеческих рук. Помогают в этом сенсорные данные, записываемые встроенным визуально-тактильным датчиком. Новый захват, по сути, состоит из двух пальцев, прикрепленных к основанию.
Основание захвата обеспечивает одно положение для закрывания и открывания, объяснил Шэ. Каждый палец оснащён линейным приводом и серводвигателем вращения, что обеспечивает в общей сложности пять оборотов. Пальцы захвата изготовлены методом 3D-печати из популярного для такого применения пластика PLA (полилактида). В кончике левого пальца руки — тактильный и одновременно визуальный датчик GelSight Mini, предоставляющий информацию о габаритах, ориентации и силе воздействия на захватываемый объект.
Исследователи оценили захват в череде экспериментов и обнаружили, что он превосходит базовые навыки манипулирования большинства простых захватов, у которых по несколько степеней свободы. Захват может эффективно выполнять два важных типа работы с объектами, известные как отделение и зачёрпывание. Например, он может имитировать движения человека, собирающего ракушки на пляже.
Роботизированный захват, представленный учёными, теперь совершенствуют для решения задач по манипулированию мягкими предметами.
- Дмитрий Ладыгин
- arxiv.org/pdf/2408.00610
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Река длиной 60 километров: зачем она протекает по дну Черного моря?
Ученые говорят: от этого потока зависит абсолютно все живое в море. Почему так происходит?...

Деревянной конструкции... 500 тысяч лет: его построили не Homo Sapiens. Но тогда кто?
Археологи говорят, что, кроме каменного, бронзового и железного, был еще один век, сейчас почти потерянный...

Аризонский инцидент: почему самолет засосало в гигантский кратер?
Крушение было неизбежно, ведь природной аномалии удалось даже опытнейшего пилота....

Умели ли древние египтяне летать: в истории 2200-летнего артефакта поставлена точка?
Эта находка более столетия вызывала ожесточенные споры у ученых, и даже сейчас, когда все вроде ясно, история Саккарской птицы явно не закончена...

NASA скрывало следы НЛО: ученый рассказал об аномалиях лунных миссий
Странные шары сопровождали астронавтов на Луне, и этот феномен до сих пор не разгадан...

Древнее «чудовище» в Кавказских горах пришлось вырубать молотками и зубилами
Новое открытие должно закрыть многие белые пятна в истории планеты...

Загадочный древнерусский город: в одном районе приносили людей жертву и в другом — верили в Христа
Изломанный человеческий череп в основании печи поразил российских археологов...

Эта гроза с молниями никогда не заканчивается. Ученые, наконец, выяснили почему
Маракайбо: 28 вспышек в минуту, 140-160 дней в году, риск попадания молнии выше всех на планете...

Почему кашалоты спят вверх головой: ученые все-таки разгадали секрет хищных китов
Тайна оказалась связанной с «чудесными» пузырьками воздуха...

NASA показало невероятные кристаллы, растущие на МКС: что там вообще происходит?
По словам ученых, когда отключается гравитация, начинаются настоящие чудеса...

Неправильные радиоволны: SETI признал, что пришельцев все время слушали не там
Отказ от старой человеческой логики в поисках уже помог найти шесть миллионов новых звезд...

Жуткое существо заставляет муравьев жить в 10 раз дольше и делает их царями в муравейнике
Биологи сумели раскрыть потрясающий ДНК-детектив, замешанный на молекулярном обмане и генетическом перепрограммировании...