
Летающий робот с четырьмя квадрокоптерами может сам контролировать положение в пространстве
Хотя беспилотные летательные аппараты (БПЛА), или дроны, широко используются в различных целях, до совершенства им далеко. Существует несколько конструкций воздушных беспилотников с различными преимуществами и характеристиками, но у большинства обычных воздушных роботов меньше независимых приводов, чем степеней свободы. На другом полюсе развития дроновой техники — летающие роботы, у которых больше независимых приводов, чем степеней свободы.
Сравнительно несложные системы часто более экономичны и просты в управлении. Однако зачастую часто менее надёжны и не столь способны к самоконтролю положения и ориентации в пространстве.
Исследователи из Баскского научно-технического объединения Tecnalia (BRTA), Испания, недавно разработали нового воздушного робота, который может независимо контролировать собственное положение и направление. Летающий робот оснащён четырьмя квадрокоптерами, совместно несущими его корпус.
Соавтор изобретения Иманол Ириарте рассказал, что они с коллегами стремились расширить границы применения беспилотных летательных аппаратов за пределы задач пассивного наблюдения. Так, хотелось сделать устройство для автоматизации работ на высоте или в удалённых местах: транспортировки грузов, мониторинга оборудования или обслуживания инфраструктуры.
Так возникла концепция воздушного робота с несколькими приводами. Сконструированный в итоге БПЛА состоит из основного корпуса, через универсальные шарниры соединенного с четырьмя квадрокоптерами.
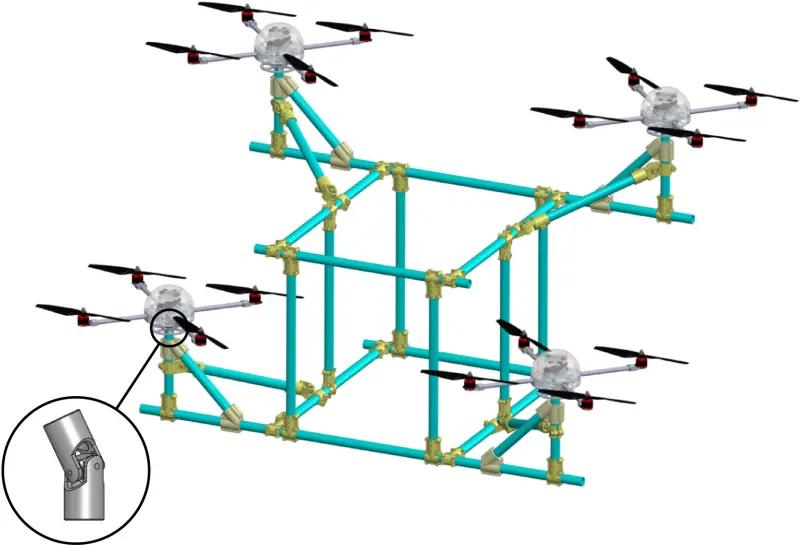
Квадрокоптеры совместно несут основной корпус, что позволяет независимо управлять шестью степенями его свободы, так что робот может выполнять сложные манёвры и точнее взаимодействовать с окружающей средой, объяснил Ириарте. Главные преимущества беспилотника — высокая управляемость, способность взлетать и приземляться на наклонных поверхностях, а также возможность изменять вектор тяги.
В дополнение к воздушному роботу изобретатели также создали специальный алгоритм управления, который преобразует положения в пространстве основного корпуса в команды угловой скорости для 16 пропеллеров робота. Программное обеспечение также эффективно нивелирует внешние помехи, тем самым ещё больше повышая управляемость.
Ириарте рассказал, что летающий робот способен самостоятельно отслеживать шесть степеней свободы своего основного корпуса, используя только пассивные механизмы, что невыполнимо для обычных мультироторов. (Мультиротором называют летательный аппарат вертолётного типа с несколькими несущими винтами).
Разработчики испытали БПЛА и методом компьютерной симуляции, и в реальных условиях. И убедились, что летающий робот может автономно контролировать шесть степеней свободы корпуса, что недостижимо для обычных воздушных беспилотников.
В следующих исследованиях баскские робототехники планируют повысить уровень автономности устройства, улучшить производительность и надёжность летающей системы, а также продумать узкоспециализированные типы нового дрона.
Сравнительно несложные системы часто более экономичны и просты в управлении. Однако зачастую часто менее надёжны и не столь способны к самоконтролю положения и ориентации в пространстве.
Исследователи из Баскского научно-технического объединения Tecnalia (BRTA), Испания, недавно разработали нового воздушного робота, который может независимо контролировать собственное положение и направление. Летающий робот оснащён четырьмя квадрокоптерами, совместно несущими его корпус.
Соавтор изобретения Иманол Ириарте рассказал, что они с коллегами стремились расширить границы применения беспилотных летательных аппаратов за пределы задач пассивного наблюдения. Так, хотелось сделать устройство для автоматизации работ на высоте или в удалённых местах: транспортировки грузов, мониторинга оборудования или обслуживания инфраструктуры.
Так возникла концепция воздушного робота с несколькими приводами. Сконструированный в итоге БПЛА состоит из основного корпуса, через универсальные шарниры соединенного с четырьмя квадрокоптерами.
Квадрокоптеры совместно несут основной корпус, что позволяет независимо управлять шестью степенями его свободы, так что робот может выполнять сложные манёвры и точнее взаимодействовать с окружающей средой, объяснил Ириарте. Главные преимущества беспилотника — высокая управляемость, способность взлетать и приземляться на наклонных поверхностях, а также возможность изменять вектор тяги.
В дополнение к воздушному роботу изобретатели также создали специальный алгоритм управления, который преобразует положения в пространстве основного корпуса в команды угловой скорости для 16 пропеллеров робота. Программное обеспечение также эффективно нивелирует внешние помехи, тем самым ещё больше повышая управляемость.
Ириарте рассказал, что летающий робот способен самостоятельно отслеживать шесть степеней свободы своего основного корпуса, используя только пассивные механизмы, что невыполнимо для обычных мультироторов. (Мультиротором называют летательный аппарат вертолётного типа с несколькими несущими винтами).
Разработчики испытали БПЛА и методом компьютерной симуляции, и в реальных условиях. И убедились, что летающий робот может автономно контролировать шесть степеней свободы корпуса, что недостижимо для обычных воздушных беспилотников.
В следующих исследованиях баскские робототехники планируют повысить уровень автономности устройства, улучшить производительность и надёжность летающей системы, а также продумать узкоспециализированные типы нового дрона.
- Дмитрий Ладыгин
- sciencedirect.com
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Битва под Каневом: почему на 350 лет замолчали сокрушительную победу России?
Неудобная победа, предательство и идеология. Мы бы могли вообще не узнать об этом триумфе русского оружия...

Бомбы с орбиты: почему советская технология, воскрешенная Китаем, встревожила США?
Американцы слишком долго считали свои системы раннего предупреждения лучшими на планете. Теперь......

С Ноева ковчега сняли запрет: что покажут радары на Арарате?
История, которую больше всего высмеивали ученые, неожиданно становится все более реальной...

Дикий народ чучуна: Кто наводил ужас на коренное население Сибири?
Йети? Люди-изгои? Древнее племя? Пока что вопросов больше, чем ответов...

Почему их ДНК не меняется уже 42 000 лет: определен самый древний народ на планете
Три раза предки жителей Океании встречались с исчезнувшими видами людей, и это в корне изменило их гены...

Тайна «косого глаза» Венеры раскрыта: что увидела нейросеть на картинах Боттичелли?
Художник нарисовал пять портретов прекрасной Симонетты Веспуччи. И каждое полотно еще больше подтверждает страшный диагноз...

Мрачный прогноз для США из 1995 года сбылся: в чем великий ученый Саган оказался прав?
Исследователь говорил: все плохо, но еще не все потеряно. Его советы могут реально помочь всему человечеству...

Новая вселенная внутри звезды: почему Эйнштейн мог ошибаться насчет черных дыр
Больше 20 лет эта гипотеза в буквальном смысле раздирает мир науки. Но, возможно, именно она выведет ученых из тупика сингулярности...

Прорыв в астрономии: найти жизнь в космосе будет гораздо проще
Ученых не пугает даже погрешность в 20%. Зато будут просканированы тысячи планет...

Марс под вопросом: что может обнулить иммунитет у космонавтов?
И почему защита организма перестает видеть микробы, выжившие в космосе?...

Снегопады в Антарктиде становятся все аномальнее: и ученые, наконец-то, знают почему?
Ученым придется пересмотреть все климатические модели Шестого континента. Кстати, снега там будет выпадать с каждым годом все больше...

43 — проклятый возраст Рюриковичей: почему многие князья не переживали этот роковой рубеж?
Генетики говорят: русская династия слишком поздно поняла, что попала в ловушку «чистой» крови...

Тайный Еще одна тайна майя: археологи секрет алтаря в заброшенном городе
Выяснилось, что индейцы долгие столетия продолжали исповедовать, казалось бы, давно забытый древний культ...

Доказана жизнь на спутнике Юпитера: как же бактериям удалось добраться с Земли на Европу?
За 3,5 миллиарда лет земные бактерии могли долететь до 105 звездных систем. Так что у Европы есть все шансы на «заражение»...

Сначала Стоунхендж был... не каменным: найден прототип легендарного святилища
Доисторическая религия оказалась старше на 500 лет, чем считали ученые. И она играла огромную роль в жизни древних людей...

Бельгийскую разведку снова взломали: хакеры целый год качали оттуда секретные данные
Эксперты говорят: проникновение было замечено совершенно случайно. И это пугает...