
Более быстрый метод обучения роботов испытали на унитазе
Исследователи из Имперского колледжа Лондона и Лаборатории обучения роботов компании Dyson представили метод Render and Diffuse (R&D), то есть «Визуализация и распространение». Так они назвали подход, который объединяет в роботизированной системе низкоуровневые (простые) действия и изображения в формате RBG с использованием виртуальной трёхмерной визуализации.
Утверждается, что представленный метод может в конечном итоге облегчить процесс обучения роботов новым навыкам. А также сократить огромное количество обучающих демонстраций с помощью человека, как того пока ещё требуют многие существующие технологии.
Ведущий автор разработки — Виталис Восилиус, аспирант Имперского колледжа Лондона. Во время стажировки в Dyson он занимался упрощением задач по обучению роботов, позволив устройствам более эффективно прогнозировать нужные действия.
Метод R&D позволяет роботам «представлять» свои действия на основе картинок, используя виртуальные рендеры, то есть преобразования трёхмерной модели из компьютерной программы в изображение.
Иными словами, используя широко доступные 3D-модели роботов и методы рендеринга, можно значительно упростить приобретение новых навыков устройствами, а также существенно снизить требования к объёму данных для обучения.
Итак, чтобы робот выполнил новую задачу, ему сначала необходимо спрогнозировать действия, которые он должен совершить, на основе изображений, получаемых датчиками. Метод R&D, по сути, позволяет роботам более эффективно соотносить изображения и действия.
Как следует из названия, новый подход состоит из двух основных этапов, объяснил Восилиус. Во-первых, устройство «воображает» свои действия практически так же, как воспринимает окружающую среду. Для этого происходит визуализация (отображение) момента, в котором он оказался бы, если бы выполнял определённые действия. Во-вторых, происходит уточнение эти воображаемых действий, что в конечном итоге приводит к последовательности реальных движений для выполнения задачи.
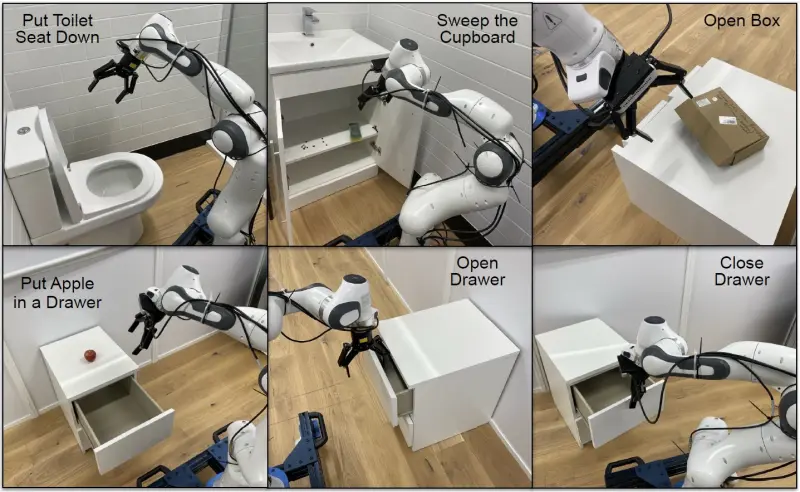
Исследователи оценили свой метод в серии компьютерных симуляций и обнаружили, что добились оптимизации. Затем убедились в том, что избрали верный путь, испытав реального физического робота при выполнении им шести повседневных задач. Робот опускал сиденье унитаза, наводил порядок в шкафу, открывал картонную коробку, укладывал яблоко в тумбочку, открывая и закрывая её.
В конечном счёте, исследователи упростили алгоритм обучения и теперь рассчитывают применить свой подход в программных продуктах для прочей робототехники.
Утверждается, что представленный метод может в конечном итоге облегчить процесс обучения роботов новым навыкам. А также сократить огромное количество обучающих демонстраций с помощью человека, как того пока ещё требуют многие существующие технологии.
Ведущий автор разработки — Виталис Восилиус, аспирант Имперского колледжа Лондона. Во время стажировки в Dyson он занимался упрощением задач по обучению роботов, позволив устройствам более эффективно прогнозировать нужные действия.
Метод R&D позволяет роботам «представлять» свои действия на основе картинок, используя виртуальные рендеры, то есть преобразования трёхмерной модели из компьютерной программы в изображение.
Иными словами, используя широко доступные 3D-модели роботов и методы рендеринга, можно значительно упростить приобретение новых навыков устройствами, а также существенно снизить требования к объёму данных для обучения.
Итак, чтобы робот выполнил новую задачу, ему сначала необходимо спрогнозировать действия, которые он должен совершить, на основе изображений, получаемых датчиками. Метод R&D, по сути, позволяет роботам более эффективно соотносить изображения и действия.
Как следует из названия, новый подход состоит из двух основных этапов, объяснил Восилиус. Во-первых, устройство «воображает» свои действия практически так же, как воспринимает окружающую среду. Для этого происходит визуализация (отображение) момента, в котором он оказался бы, если бы выполнял определённые действия. Во-вторых, происходит уточнение эти воображаемых действий, что в конечном итоге приводит к последовательности реальных движений для выполнения задачи.
Исследователи оценили свой метод в серии компьютерных симуляций и обнаружили, что добились оптимизации. Затем убедились в том, что избрали верный путь, испытав реального физического робота при выполнении им шести повседневных задач. Робот опускал сиденье унитаза, наводил порядок в шкафу, открывал картонную коробку, укладывал яблоко в тумбочку, открывая и закрывая её.
В конечном счёте, исследователи упростили алгоритм обучения и теперь рассчитывают применить свой подход в программных продуктах для прочей робототехники.
- Дмитрий Ладыгин
- arxiv.org/pdf/2405.18196
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Третье пророчество китайского Нострадамуса: почему Иран победит США
Два предсказания уже сбылось, когда ждать исполнения третьего прогноза...

7000-летняя загадка: полный ров обезглавленных скелетов обнаружен в Словакии
Археологи в растерянности: совершенно непонятно, кто и зачем изъял черепа у 77 человек...

Обломок взорвавшейся планеты размером с Луну нашли в самом сердце Сахары
Откуда он там взялся и что вообще творилось на заре существования Солнечной системы?...

МКС снова переехала: почему в этом «виноваты» русские?
Без российских кораблей международная станция давно бы упала и сгорела...

Тайны «северной столицы»: чем поразил археологов главный город гуннов?
Этот мегаполис вообще не должен был существовать, так как нарушает все правила...

5000 лет исторической тайны: кто жил на Дону до славян, рассказали археологи
95 образцов, 11 курганов, 10 стоянок полностью переписали прежнюю хронологию...

Жизнью мы обязаны Юпитеру: почему эта планета отметилась в ДНК каждого из нас?
Американские ученые полностью переписали одну из главных страниц в истории Земли...

Российские дроны заглянули под землю: какие тайны раскрыл древнеримский город Парион?
Ученые копают здесь уже 20 лет, но прорыв случился, когда россияне применили новейшие технологии...

Боевые комары Пентагона: детали секретного проекта наконец-то раскрыты
Почему эксперты признают: у этих экспериментов был большой потенциал?...

Тайна аномальных снегопадов в Антарктиде раскрыта: виноваты невидимые «реки»
Ученым придется пересмотреть все климатические модели Шестого континента. Кстати, снега там будет выпадать с каждым годом все больше...