
Рой роботов научили самоорганизации по принципу муравьев
Один муравей не очень умен, но если собрать их вместе, они смогут добиться замечательных результатов. Вдохновленные этим возникающим кооперативным поведением, исследователи из Гарварда создали роботов, которые могут работать вместе, чтобы сбежать из «тюрьмы», не нуждаясь в конкретном плане.
В некотором смысле муравьиная колония работает по алгоритму: отдельные муравьи не думают конкретно о задаче, но они следуют набору инстинктивных правил, которые направляют их к сложным инженерным подвигам, таким как рытье сетей туннелей или строительство мостов. Они общаются друг с другом с помощью антенн и феромонных следов.
Команда Гарварда начала с проведения эксперимента с небольшой группой муравьев, помещенных в загон, круглую ловушку, окруженную мягкой песчаной стеной, чтобы увидеть, как они работают вместе. Сначала все муравьи бродили хаотично, но вскоре некоторые из них начали копаться в стенах. Со временем команда обнаружила, что муравьи перестали рыть в одиночку и вместо этого стали собираться вместе, чтобы более эффективно работать в одном туннеле, пока им не удалось вырваться наружу.
На основе наблюдений исследователи построили математические модели происходящего. Когда муравьи сталкивались друг с другом, они обменивались информацией с помощью феромонов. Со временем муравьи начали отдавать предпочтение областям, где взаимодействие происходило чаще, создавая петлю обратной связи. Это позволило сосредоточить усилия на рытье в одном месте вместо того, чтобы каждый рыл собственные туннели.
Получив модель, команда приступила к созданию роботов, которые следовали схожим правилам. Роботизированные муравьи, которых назвали RAnt, не выделяли химических феромонов, а оставляли после себя световые поля, или «фоторомоны», которые становились ярче по мере того, как другие роботы проходили мимо.
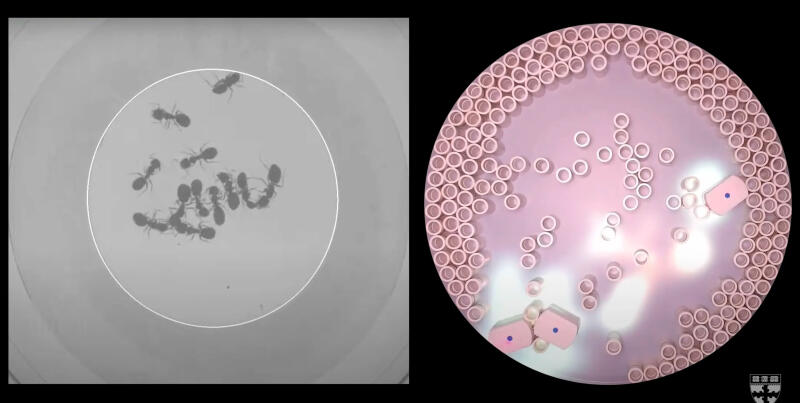
RAnts были запрограммированы по трем простым правилам: они должны следовать градиенту поля фоторомона, избегать других роботов в местах с высокой плотностью поля и подбирать препятствия в местах с высокой плотностью, перемещая их в области с низкой плотностью.
Правила позволили RAnt сотрудничать почти так же, как в эксперименте с муравьями. Помещенные в загон, с несколькими кольцами препятствий, роботы вскоре поняли, что лучший план побега — работать вместе.
Метод может быть жизненно важен для создания роев простых роботов, которые могут выполнять сложные задачи, работая вместе. Ученые утверждают, что модель потенциально может быть расширена до десятков или сотен роботов для различных вариантов использования. Дополнительный бонус: даже если несколько роботов выйдут из строя, рой в целом все равно сможет выполнить свою работу.
— С. Ганга Прасат, соавтор исследования.
Исследование опубликовано в журнале eLife.
В некотором смысле муравьиная колония работает по алгоритму: отдельные муравьи не думают конкретно о задаче, но они следуют набору инстинктивных правил, которые направляют их к сложным инженерным подвигам, таким как рытье сетей туннелей или строительство мостов. Они общаются друг с другом с помощью антенн и феромонных следов.
Команда Гарварда начала с проведения эксперимента с небольшой группой муравьев, помещенных в загон, круглую ловушку, окруженную мягкой песчаной стеной, чтобы увидеть, как они работают вместе. Сначала все муравьи бродили хаотично, но вскоре некоторые из них начали копаться в стенах. Со временем команда обнаружила, что муравьи перестали рыть в одиночку и вместо этого стали собираться вместе, чтобы более эффективно работать в одном туннеле, пока им не удалось вырваться наружу.
На основе наблюдений исследователи построили математические модели происходящего. Когда муравьи сталкивались друг с другом, они обменивались информацией с помощью феромонов. Со временем муравьи начали отдавать предпочтение областям, где взаимодействие происходило чаще, создавая петлю обратной связи. Это позволило сосредоточить усилия на рытье в одном месте вместо того, чтобы каждый рыл собственные туннели.
Получив модель, команда приступила к созданию роботов, которые следовали схожим правилам. Роботизированные муравьи, которых назвали RAnt, не выделяли химических феромонов, а оставляли после себя световые поля, или «фоторомоны», которые становились ярче по мере того, как другие роботы проходили мимо.
RAnts были запрограммированы по трем простым правилам: они должны следовать градиенту поля фоторомона, избегать других роботов в местах с высокой плотностью поля и подбирать препятствия в местах с высокой плотностью, перемещая их в области с низкой плотностью.
Правила позволили RAnt сотрудничать почти так же, как в эксперименте с муравьями. Помещенные в загон, с несколькими кольцами препятствий, роботы вскоре поняли, что лучший план побега — работать вместе.
Метод может быть жизненно важен для создания роев простых роботов, которые могут выполнять сложные задачи, работая вместе. Ученые утверждают, что модель потенциально может быть расширена до десятков или сотен роботов для различных вариантов использования. Дополнительный бонус: даже если несколько роботов выйдут из строя, рой в целом все равно сможет выполнить свою работу.
Мы показали, как совместное выполнение задач может возникнуть из простых правил, и аналогичные поведенческие правила могут применяться для решения других сложных задач, таких как строительство, поиск, спасение и оборона
— С. Ганга Прасат, соавтор исследования.
Исследование опубликовано в журнале eLife.
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Конец 30-летней легенды: Эверест может лишиться одного из главных символов
Эксперты предупреждают индийское правительство: экспедиция будет крайне опасной и вряд ли закончится успехом. Почему?...

Феномен Великой Зеленой стены: за счет чего 66 миллиардов деревьев, высаженных Китаем, растут быстрее естественных лесов?
И почему ученые решили, что природные леса все-таки лучше рукотворных?...

Тайна золотого вулкана: почему гора в Антарктике извергает драгоценный металл?
Ученые уже 30 лет пытаются разгадать этот природный детектив. Что удалось узнать исследователям...

Тайну четырех черных яиц с 6000-метров глубины океана раскрыли японские ученые
Дно морей изучено гораздо хуже, чем поверхность Марса и Луны. Неудивительно, что исследователи постоянно делают открытия...

Проклятье 30 июня: почему в этот день произошло столько крупных катастроф?
Официально виновата погода, но изучение деталей до сих пор вызывает множество вопросов...

Секрет охоты на мамонтов открыт: ученые только что разрушили один из главных мифов древней истории
То, что наука считала исторической реконструкцией, оказалось обычным эпизодом из голливудского фильма...

Ученые «разжаловали» индонезийских хоббитов из умников: огнем не владели, подъедались за варанами
Что же заставило археологов переписать целый пласт древней истории?...

Аномальный дождь из рыбы: 150 лет ученые не могут объяснить эту тайну природы
Это явление официально считается неразгаданным феноменом и проходит в категории чудес и головной боли для науки...

Космический детектив: почему уникальную планету GJ 3378b никак не признают «второй Землей»?
Сами ученые призывают не торопиться с выводами, ведь истории с инопланетным объектом существует множество интересных нюансов...

316 лет на троих: ученые назвали три секрета феноменального долголетия сестер Нунес
Специалисты говорят: важно получить «хорошие гены», но еще важнее ими правильно распорядиться...

Серная кислота в небе: чем грозит пассажирам новый экологический проект?
Эксперты говорят: от этих планов вряд ли откажутся. Но есть ли у нас время, чтобы подготовиться?...