
Искусственное щупальце заставили вертеться из стороны в сторону и хватать объекты
Команда китайских инженеров из университетов Бэйхан и Цинхуа спроектировали, собрали и протестировали роботизированный манипулятор-щупальце. Устройство способно хватать, поднимать и перемещать предметы и в обычных условиях, и под водой. В журнале Science Robotics («Научная робототехника») создатели щупальца описали весь процесс, от воплощения до испытаний.
В течение многих лет ученые наблюдали поведение осьминогов. Эти морские животные способны разнообразно двигать конечностями с присосками, чтобы поднимать предметы, защищаться и передвигаться по морскому дну. Исследователи стремились сконструировать роботов с аналогичными возможностями. И вот китайские инженеры придумали и собрали робощупальце по образцу осьминожьего.
Воплощённый образец умеет растягиваться, сворачиваться и разворачиваться. Регулируемое давление в чашечках-присосках позволяет захватывать предметы, к тому же обвиваясь вокруг них.
Создатели объяснили, что робощупальце сворачивается за счёт пяти сегментов внутри, которые имитируют нервную систему. Электрические сигналы передаются с помощью жидкометаллических проводов, что обеспечивает максимальную гибкость.
На манипуляторе есть не только присоски, но и датчики температуры. У робота беспроводное управление: оператор отдаёт команды, надев специальный напальчник, как показано на иллюстрации. Такой способ позволяет контролировать изгиб, наклон, крен и ускорение устройства.
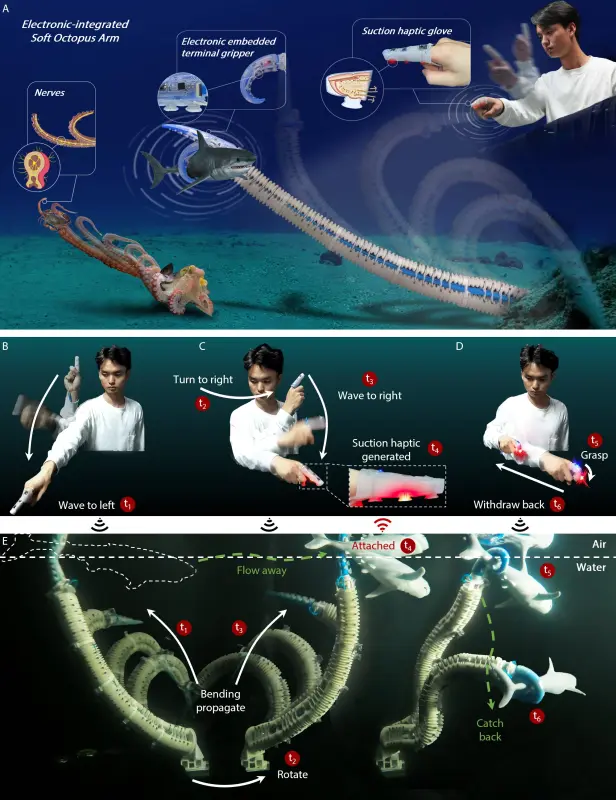
Для точности при управлении в манипулятор также встроили систему сенсорной обратной связи. Она позволяет оператору чувствовать, к чему прикасаются присоски. Ощущения передаются в контроллер-напальчник через пупырышки внутри. Опыты показали, что обратная связь оказалась достаточно точной, так как оператор смог вслепую нащупывать и захватывать предметы — это были игрушечные акулы и мячи.
Инженеры-создатели утверждают, что изобретение равно хорошо себя проявило и в обычных условиях, и в воде.
В течение многих лет ученые наблюдали поведение осьминогов. Эти морские животные способны разнообразно двигать конечностями с присосками, чтобы поднимать предметы, защищаться и передвигаться по морскому дну. Исследователи стремились сконструировать роботов с аналогичными возможностями. И вот китайские инженеры придумали и собрали робощупальце по образцу осьминожьего.
Воплощённый образец умеет растягиваться, сворачиваться и разворачиваться. Регулируемое давление в чашечках-присосках позволяет захватывать предметы, к тому же обвиваясь вокруг них.
Создатели объяснили, что робощупальце сворачивается за счёт пяти сегментов внутри, которые имитируют нервную систему. Электрические сигналы передаются с помощью жидкометаллических проводов, что обеспечивает максимальную гибкость.
На манипуляторе есть не только присоски, но и датчики температуры. У робота беспроводное управление: оператор отдаёт команды, надев специальный напальчник, как показано на иллюстрации. Такой способ позволяет контролировать изгиб, наклон, крен и ускорение устройства.
Для точности при управлении в манипулятор также встроили систему сенсорной обратной связи. Она позволяет оператору чувствовать, к чему прикасаются присоски. Ощущения передаются в контроллер-напальчник через пупырышки внутри. Опыты показали, что обратная связь оказалась достаточно точной, так как оператор смог вслепую нащупывать и захватывать предметы — это были игрушечные акулы и мячи.
Инженеры-создатели утверждают, что изобретение равно хорошо себя проявило и в обычных условиях, и в воде.
- Дмитрий Ладыгин
- youtu.be/xfZwy8Moq_s
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Бомбы с орбиты: почему советская технология, воскрешенная Китаем, встревожила США?
Американцы слишком долго считали свои системы раннего предупреждения лучшими на планете. Теперь......

Битва под Каневом: почему на 350 лет замолчали сокрушительную победу России?
Неудобная победа, предательство и идеология. Мы бы могли вообще не узнать об этом триумфе русского оружия...

С Ноева ковчега сняли запрет: что покажут радары на Арарате?
История, которую больше всего высмеивали ученые, неожиданно становится все более реальной...

Дикий народ чучуна: Кто наводил ужас на коренное население Сибири?
Йети? Люди-изгои? Древнее племя? Пока что вопросов больше, чем ответов...

Мрачный прогноз для США из 1995 года сбылся: в чем великий ученый Саган оказался прав?
Исследователь говорил: все плохо, но еще не все потеряно. Его советы могут реально помочь всему человечеству...

Почему их ДНК не меняется уже 42 000 лет: определен самый древний народ на планете
Три раза предки жителей Океании встречались с исчезнувшими видами людей, и это в корне изменило их гены...

Тайна «косого глаза» Венеры раскрыта: что увидела нейросеть на картинах Боттичелли?
Художник нарисовал пять портретов прекрасной Симонетты Веспуччи. И каждое полотно еще больше подтверждает страшный диагноз...

Кипящая дыра в Йеллоустоуне: почему геологи «проморгали» опасный инцидент?
Геологический детектив: незамеченный взрыв, неожиданный провал и далеко идущие последствия...

Васюганские топи: что скрывает самое большое болото на планете?
И почему его называют вечно молодым? И кто прятался в самом сердце мрачных болот?...

Новая вселенная внутри звезды: почему Эйнштейн мог ошибаться насчет черных дыр
Больше 20 лет эта гипотеза в буквальном смысле раздирает мир науки. Но, возможно, именно она выведет ученых из тупика сингулярности...

Еще одна тайна майя: археологи секрет алтаря в заброшенном городе
Выяснилось, что индейцы долгие столетия продолжали исповедовать, казалось бы, давно забытый древний культ...

Снегопады в Антарктиде становятся все аномальнее: и ученые, наконец-то, знают почему?
Ученым придется пересмотреть все климатические модели Шестого континента. Кстати, снега там будет выпадать с каждым годом все больше...

Марс под вопросом: что может обнулить иммунитет у космонавтов?
И почему защита организма перестает видеть микробы, выжившие в космосе?...

43 — проклятый возраст Рюриковичей: почему многие князья не переживали этот роковой рубеж?
Генетики говорят: русская династия слишком поздно поняла, что попала в ловушку «чистой» крови...

Бельгийскую разведку снова взломали: хакеры целый год качали оттуда секретные данные
Эксперты говорят: проникновение было замечено совершенно случайно. И это пугает...

Доказана жизнь на спутнике Юпитера: как же бактериям удалось добраться с Земли на Европу?
За 3,5 миллиарда лет земные бактерии могли долететь до 105 звездных систем. Так что у Европы есть все шансы на «заражение»...