
Инструкции прилагаются: робот-оригами CurveQuad с единственным двигателем дрыгается к интересной цели
Шагающие и ползающие роботы сантиметрового масштаба представляют собой большой интерес по нескольким причинам. Во-первых, их можно отправлять на разведку в крошечные пустоты или в завалы. Во-вторых, они дёшевы в производстве. Третье преимущество следует из второго: с исчерпывающей инструкцией по изготовлению такие устройства по плечу даже пытливому школьнику.
Физическими возможностями робота-оригами вдохновились исследователи под руководством Синтии Сунг, доцента факультета машиностроения и прикладной механики из Пенсильванского университета. Коллеги сумели оптимизировать подход к проектированию и изготовлению таких устройств.
Робот сантиметрового масштаба CurveQuad использует свои складные изгибы, чтобы с помощью одного двигателя, сжимаясь и разжимаясь, фактически дрыгаясь, передвигаться в нужном направлении. У его изогнутых складок благодаря упругости интересные механические свойства в сравнении с более распространёнными для таких задач прямыми складками. Возникающая энергия даёт возможность совершать контролируемые, обратимые и сложные движения с меньшим количеством приводов.
Сунг уточнила, что CurveQuad способен на такое именно благодаря изогнутым складкам. А его простота и дешевизна дают надежду, что можно будет за считанные доллары быстро производить и запускать в дело целые рои из подобных роботов.
Единственный двигатель CurveQuad существенно снижает массу и объём робота. Дизайн по принципу оригами весьма упрощают и производство, и сборку, ведь всё устройство, как и его компоненты — дополненный механизмом сложенный, как нужно, листовой материал, в который может быть впечатана вся необходимая электроника вместе с ПО. И при необходимости производственный процесс можно укрупнить для получения больших серийных партий.
Дэниел Фешбах из Лаборатории робототехники Синтии Сунг сказал, что CurveQuad пополнил «малонаселённую» нишу конструирования управляемых шагающих устройств с одним приводом. При длине всего в 8 см и весе около 11 г он сравнительно компактный и лёгкий для шагающего моторизованного робота.
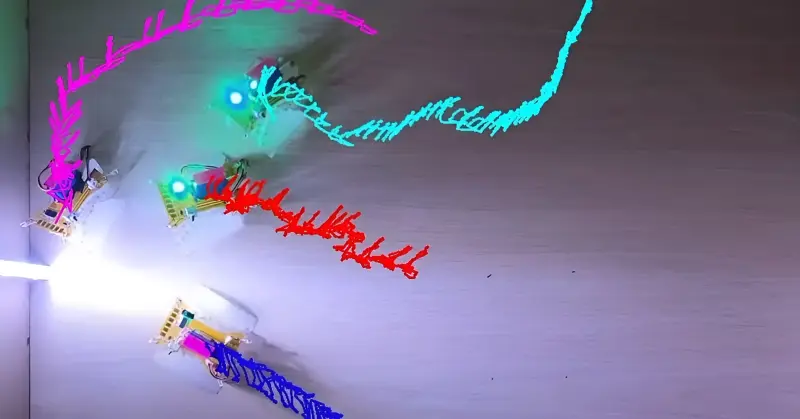
Исследователи показали базовые возможности управления с обратной связью. Они посылали робота к источнику света из различных исходных положений. Затем создали мини-рой из четырёх штук, которым нужно было одновременно направиться к свету. Результаты показали, что изгибы и складки обеспечивали сложное «поведение» типа локомоции, то есть за счёт активных движений.
Сунг объяснила, что цель её лаборатории — упростить конструкцию для простой и лёгкой сборки. Такие настраиваемые устройства будут доступны всем желающим. Она описала как пример коробку с плоскими на время хранения роботами. При необходимости они смогут сложиться и пойти на задание, для наблюдения или зондирования. А после их опять можно разложить и стопкой отправить в коробку.
Теперь Синтия Сунг с коллегами трудятся над версией CurveQuad с полностью встроенной в него электроникой как раз для такого скорого и обозримого будущего.
Полная информацию для изготовления CurveQuad доступна по ссылке.
Физическими возможностями робота-оригами вдохновились исследователи под руководством Синтии Сунг, доцента факультета машиностроения и прикладной механики из Пенсильванского университета. Коллеги сумели оптимизировать подход к проектированию и изготовлению таких устройств.
Робот сантиметрового масштаба CurveQuad использует свои складные изгибы, чтобы с помощью одного двигателя, сжимаясь и разжимаясь, фактически дрыгаясь, передвигаться в нужном направлении. У его изогнутых складок благодаря упругости интересные механические свойства в сравнении с более распространёнными для таких задач прямыми складками. Возникающая энергия даёт возможность совершать контролируемые, обратимые и сложные движения с меньшим количеством приводов.
Сунг уточнила, что CurveQuad способен на такое именно благодаря изогнутым складкам. А его простота и дешевизна дают надежду, что можно будет за считанные доллары быстро производить и запускать в дело целые рои из подобных роботов.
Единственный двигатель CurveQuad существенно снижает массу и объём робота. Дизайн по принципу оригами весьма упрощают и производство, и сборку, ведь всё устройство, как и его компоненты — дополненный механизмом сложенный, как нужно, листовой материал, в который может быть впечатана вся необходимая электроника вместе с ПО. И при необходимости производственный процесс можно укрупнить для получения больших серийных партий.
Дэниел Фешбах из Лаборатории робототехники Синтии Сунг сказал, что CurveQuad пополнил «малонаселённую» нишу конструирования управляемых шагающих устройств с одним приводом. При длине всего в 8 см и весе около 11 г он сравнительно компактный и лёгкий для шагающего моторизованного робота.
Исследователи показали базовые возможности управления с обратной связью. Они посылали робота к источнику света из различных исходных положений. Затем создали мини-рой из четырёх штук, которым нужно было одновременно направиться к свету. Результаты показали, что изгибы и складки обеспечивали сложное «поведение» типа локомоции, то есть за счёт активных движений.
Сунг объяснила, что цель её лаборатории — упростить конструкцию для простой и лёгкой сборки. Такие настраиваемые устройства будут доступны всем желающим. Она описала как пример коробку с плоскими на время хранения роботами. При необходимости они смогут сложиться и пойти на задание, для наблюдения или зондирования. А после их опять можно разложить и стопкой отправить в коробку.
Теперь Синтия Сунг с коллегами трудятся над версией CurveQuad с полностью встроенной в него электроникой как раз для такого скорого и обозримого будущего.
Полная информацию для изготовления CurveQuad доступна по ссылке.
- Дмитрий Ладыгин
- youtu.be/RnSHG5F2Iek
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Река длиной 60 километров: зачем она протекает по дну Черного моря?
Ученые говорят: от этого потока зависит абсолютно все живое в море. Почему так происходит?...

Деревянной конструкции... 500 тысяч лет: его построили не Homo Sapiens. Но тогда кто?
Археологи говорят, что, кроме каменного, бронзового и железного, был еще один век, сейчас почти потерянный...

Умели ли древние египтяне летать: в истории 2200-летнего артефакта поставлена точка?
Эта находка более столетия вызывала ожесточенные споры у ученых, и даже сейчас, когда все вроде ясно, история Саккарской птицы явно не закончена...

Жуткое существо заставляет муравьев жить в 10 раз дольше и делает их царями в муравейнике
Биологи сумели раскрыть потрясающий ДНК-детектив, замешанный на молекулярном обмане и генетическом перепрограммировании...

NASA скрывало следы НЛО: ученый рассказал об аномалиях лунных миссий
Странные шары сопровождали астронавтов на Луне, и этот феномен до сих пор не разгадан...

Загадочный древнерусский город: в одном районе приносили людей жертву и в другом — верили в Христа
Изломанный человеческий череп в основании печи поразил российских археологов...

Эта гроза с молниями никогда не заканчивается. Ученые, наконец, выяснили почему
Маракайбо: 28 вспышек в минуту, 140-160 дней в году, риск попадания молнии выше всех на планете...

Почему кашалоты спят вверх головой: ученые все-таки разгадали секрет хищных китов
Тайна оказалась связанной с «чудесными» пузырьками воздуха...

Американская Камчатка: как Ленин едва не отдал российский полуостров США
Почему не состоялась главная сделка XX века, о которой предпочитают не вспоминать ни в Москве, ни в Вашингтоне...

NASA показало невероятные кристаллы, растущие на МКС: что там вообще происходит?
По словам ученых, когда отключается гравитация, начинаются настоящие чудеса...

Неправильные радиоволны: SETI признал, что пришельцев все время слушали не там
Отказ от старой человеческой логики в поисках уже помог найти шесть миллионов новых звезд...

Две звезды со сферами Дайсона: что открыл космический телескоп «Джеймс Уэбб»
Астрофизики признаются, что Вселенная подложила землянам свинью галактических масштабов...

Пентагон планирует ИИ-переворот в военном деле: как изменится поле боя в ближайшее время?
Эксперты говорят: если все патенты будут реализованы, война уже никогда не будет прежней...