
Исследователи разработали магнитных микророботов для создания объектов в трёхмерной среде
Исследователи из лаборатории хирургической робототехники Университета Твенте впервые в истории смогли заставить двух микророботов совместно выполнять различные задачи в 3D пространстве. Магнитные микророботы размером всего в 1 миллиметр успешно поднимали и передвигали объекты несмотря на проблемы с прилипанием друг к другу из-за своих магнитных свойств. У роботов, так же как и у обычных магнитов, был предел расстояния, после которого они начинали слипаться. Ученые нашли способ сделать из недостатка полезный инструмент при помощи специального контроллера.
Подобные микророботы абсолютно безопасны для человеческого организма и могут работать в труднодоступных местах, что делает их перспективными для медицинских исследований.
— Франко Пиньян Басуальдо, научный сотрудник Лаборатории хирургической робототехники, автор-корреспондент публикации.
Профессор Сартак Мисра, руководитель лаборатории, концентрирует свои усилия на разработке инновационных решений для широкого круга клинически актуальных задач, включая биомедицинскую визуализацию, автоматизацию медицинских процедур и создание микроробототехнических инструментов.
Исследования в области микроробототехники открывают перед человечеством новые горизонты и перспективы. С их помощью возможно создание революционных методов лечения и диагностики заболеваний, а также решение множества сложных задач в сфере биомедицины. На основе этой технологии можно в корне изменить подход к проведению хирургических операций и других медицинских процедур. Это шаг в будущее, где микророботы могут стать незаменимыми помощниками врачей.
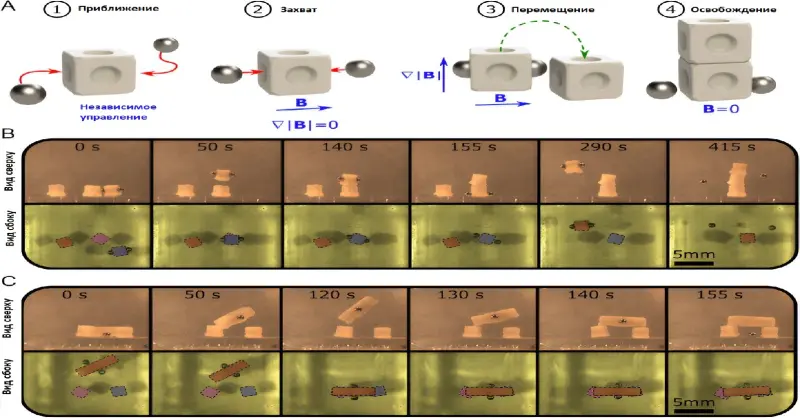
Результаты экспериментального совместного захвата и сборки. Магнитные агенты представляют собой сферы из нержавеющей стали диаметром 1 мм, а пассивные объекты — кубики размером 2 мм, напечатанные на 3D-принтере. А) Процедура состояла из четырех этапов: приближения, захвата, пермещения и освобождения. Сплошные красные стрелки показывают движение магнитных агентов, а пунктирная зеленая стрелка показывает движение предмета. B) Снимки эксперимента по захвату и укладке трех кубиков. C) Снимки захвата и укладки бруса на вершину конструкции с двумя кубиками. Пассивные объекты (кубы и балки) выделены для большей наглядности.
Исследование проводилось в рамках европейского проекта RĔGO (программа Horizon Europe), целью которого является разработка инновационного набора микроразмерных, реагирующих на стимулы, несвязанных групп роботов на базе искусственного интеллекта. Результаты были опубликованы в журнале Advanced Intelligent Systems.
Подобные микророботы абсолютно безопасны для человеческого организма и могут работать в труднодоступных местах, что делает их перспективными для медицинских исследований.
Мы можем работать с биологическими образцами удаленно и без риска их загрязнения. Такое новшество может улучшить существующие процедуры и открыть путь новым, ранее недоступным ввиду ограничений медицинских технологий
— Франко Пиньян Басуальдо, научный сотрудник Лаборатории хирургической робототехники, автор-корреспондент публикации.
Союз медицины и роботов
Профессор Сартак Мисра, руководитель лаборатории, концентрирует свои усилия на разработке инновационных решений для широкого круга клинически актуальных задач, включая биомедицинскую визуализацию, автоматизацию медицинских процедур и создание микроробототехнических инструментов.
Исследования в области микроробототехники открывают перед человечеством новые горизонты и перспективы. С их помощью возможно создание революционных методов лечения и диагностики заболеваний, а также решение множества сложных задач в сфере биомедицины. На основе этой технологии можно в корне изменить подход к проведению хирургических операций и других медицинских процедур. Это шаг в будущее, где микророботы могут стать незаменимыми помощниками врачей.
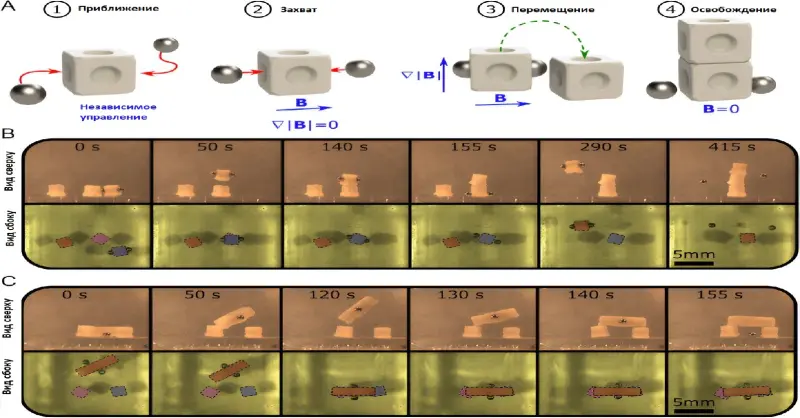
Результаты экспериментального совместного захвата и сборки. Магнитные агенты представляют собой сферы из нержавеющей стали диаметром 1 мм, а пассивные объекты — кубики размером 2 мм, напечатанные на 3D-принтере. А) Процедура состояла из четырех этапов: приближения, захвата, пермещения и освобождения. Сплошные красные стрелки показывают движение магнитных агентов, а пунктирная зеленая стрелка показывает движение предмета. B) Снимки эксперимента по захвату и укладке трех кубиков. C) Снимки захвата и укладки бруса на вершину конструкции с двумя кубиками. Пассивные объекты (кубы и балки) выделены для большей наглядности.
Исследование проводилось в рамках европейского проекта RĔGO (программа Horizon Europe), целью которого является разработка инновационного набора микроразмерных, реагирующих на стимулы, несвязанных групп роботов на базе искусственного интеллекта. Результаты были опубликованы в журнале Advanced Intelligent Systems.
- Алексей Павлов
- Advanced Intelligent Systems
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Битва под Каневом: почему на 350 лет замолчали сокрушительную победу России?
Неудобная победа, предательство и идеология. Мы бы могли вообще не узнать об этом триумфе русского оружия...

Бомбы с орбиты: почему советская технология, воскрешенная Китаем, встревожила США?
Американцы слишком долго считали свои системы раннего предупреждения лучшими на планете. Теперь......

С Ноева ковчега сняли запрет: что покажут радары на Арарате?
История, которую больше всего высмеивали ученые, неожиданно становится все более реальной...

Дикий народ чучуна: Кто наводил ужас на коренное население Сибири?
Йети? Люди-изгои? Древнее племя? Пока что вопросов больше, чем ответов...

Почему их ДНК не меняется уже 42 000 лет: определен самый древний народ на планете
Три раза предки жителей Океании встречались с исчезнувшими видами людей, и это в корне изменило их гены...

Тайна «косого глаза» Венеры раскрыта: что увидела нейросеть на картинах Боттичелли?
Художник нарисовал пять портретов прекрасной Симонетты Веспуччи. И каждое полотно еще больше подтверждает страшный диагноз...

Мрачный прогноз для США из 1995 года сбылся: в чем великий ученый Саган оказался прав?
Исследователь говорил: все плохо, но еще не все потеряно. Его советы могут реально помочь всему человечеству...

Новая вселенная внутри звезды: почему Эйнштейн мог ошибаться насчет черных дыр
Больше 20 лет эта гипотеза в буквальном смысле раздирает мир науки. Но, возможно, именно она выведет ученых из тупика сингулярности...

Снегопады в Антарктиде становятся все аномальнее: и ученые, наконец-то, знают почему?
Ученым придется пересмотреть все климатические модели Шестого континента. Кстати, снега там будет выпадать с каждым годом все больше...

Прорыв в астрономии: найти жизнь в космосе будет гораздо проще
Ученых не пугает даже погрешность в 20%. Зато будут просканированы тысячи планет...

Тайный Еще одна тайна майя: археологи секрет алтаря в заброшенном городе
Выяснилось, что индейцы долгие столетия продолжали исповедовать, казалось бы, давно забытый древний культ...

Марс под вопросом: что может обнулить иммунитет у космонавтов?
И почему защита организма перестает видеть микробы, выжившие в космосе?...

43 — проклятый возраст Рюриковичей: почему многие князья не переживали этот роковой рубеж?
Генетики говорят: русская династия слишком поздно поняла, что попала в ловушку «чистой» крови...

Доказана жизнь на спутнике Юпитера: как же бактериям удалось добраться с Земли на Европу?
За 3,5 миллиарда лет земные бактерии могли долететь до 105 звездных систем. Так что у Европы есть все шансы на «заражение»...

Сначала Стоунхендж был... не каменным: найден прототип легендарного святилища
Доисторическая религия оказалась старше на 500 лет, чем считали ученые. И она играла огромную роль в жизни древних людей...

Бельгийскую разведку снова взломали: хакеры целый год качали оттуда секретные данные
Эксперты говорят: проникновение было замечено совершенно случайно. И это пугает...