
Робот-рулетка соберёт урожай плодов и открутит крышку
Многие в детстве (и не только в детстве), взяв в руки стальную рулетку, вытягивали этот измерительный инструмент, чтобы посмотреть, насколько хватит жёсткости, прежде чем полотно согнётся. Для инженеров из Калифорнийского университета в Сан-Диего эта забава переросла в источник вдохновения. Они предположили, что рулетка может стать отличной основой для роботизированного захвата.
По словам учёных, такие захваты особенно хороши в сельском хозяйстве, так как достаточно деликатно срывают фрукты и овощи. К тому же такие устройства выходят недорогими и безопасными для людей.
Изобретатели назвали своего робота GRIP-tape. Вторая часть названия переводится как «лента», а GRIP на слух звучит как слово со значением «захват», но, будучи аббревиатурой, означает также сочетание Grasping and Rolling In-Plane, то есть «Захватывание и перекатывание в плоскости».
Уже известные другие захваты, которые могли расширяться или выдвигаться, получались громоздкими. А всё потому, что им придавали дополнительные механизмы. Разработанный в Сан-Диего GRIP-tape решил эту проблему.
Суть в том, что подпружиненная стальная лента — штука прочная и гибкая, её можно хранить в небольшом контейнере в сложенном виде, а в развёрнутом виде она может удлиняться очень значительно. После серии экспериментов, спустя череду проб и ошибок, инженеры определили, что лучшая основа для захвата — это две склеенные воедино ленты.
Соавтор изобретения Ник Грейвиш сказал, что им с коллегами нравится искать нетрадиционные, неочевидные решения для роботов.
— Грейвиш.
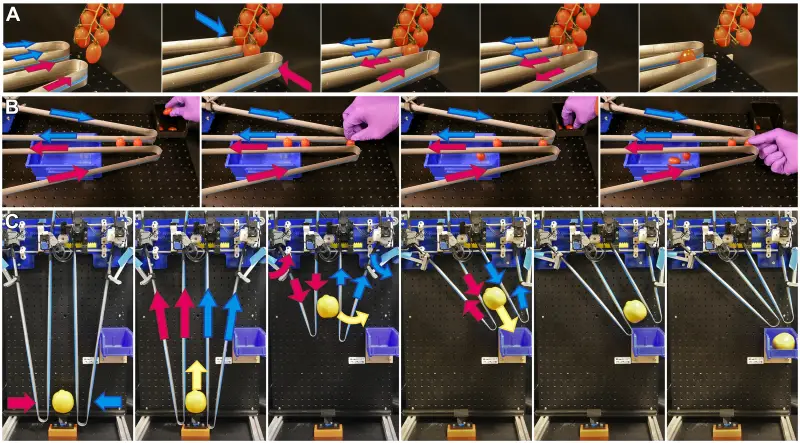
Захват включает два «пальца», которые выдвигаются из отдельных катушек. Каждая катушка из сдвоенных рулеточных полотен соответственно компактна, и лишь толика выступает треугольником, образуя «палец». Треугольные секции-«пальцы» управляются четырьмя двигателями. Каждый «палец» может двигаться независимо. Секции удлиняются, чтобы достигать нужных объектов и, при необходимости, приближать их.
У роботизированного захвата оказался широкий спектр применения, в том числе он годится, чтобы крутящими движениями открывать банки с металлическими крышками, менять электролампочки и пользоваться отвёртками.
Захват интересен тем, что использует всю длину ленты в качестве рабочей поверхности. Захват может удерживать широкий спектр предметов разной формы и жёсткости, от резинового мячика или одного помидора до целой грозди томатов. Поскольку сама лента может действовать как конвейерная, захват способен помещать удерживаемые объекты в контейнеры.
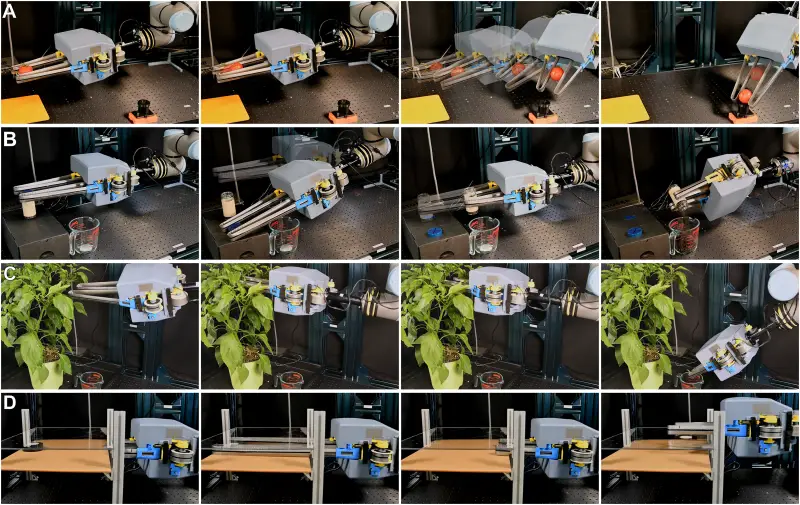
А поскольку лента гибкая, она также может огибать препятствия, с которыми столкнётся захват на пути к цели. Эксперименты показали, что манипулятор может легко собирать с веток достаточно крупные плоды, например, свежие лимоны.
Следующие версии изобретения хотят усовершенствовать до автономного устройства, добавив датчики и функцию анализа данных с помощью искусственного интеллекта.
По словам учёных, такие захваты особенно хороши в сельском хозяйстве, так как достаточно деликатно срывают фрукты и овощи. К тому же такие устройства выходят недорогими и безопасными для людей.
Изобретатели назвали своего робота GRIP-tape. Вторая часть названия переводится как «лента», а GRIP на слух звучит как слово со значением «захват», но, будучи аббревиатурой, означает также сочетание Grasping and Rolling In-Plane, то есть «Захватывание и перекатывание в плоскости».
Уже известные другие захваты, которые могли расширяться или выдвигаться, получались громоздкими. А всё потому, что им придавали дополнительные механизмы. Разработанный в Сан-Диего GRIP-tape решил эту проблему.
Суть в том, что подпружиненная стальная лента — штука прочная и гибкая, её можно хранить в небольшом контейнере в сложенном виде, а в развёрнутом виде она может удлиняться очень значительно. После серии экспериментов, спустя череду проб и ошибок, инженеры определили, что лучшая основа для захвата — это две склеенные воедино ленты.
Соавтор изобретения Ник Грейвиш сказал, что им с коллегами нравится искать нетрадиционные, неочевидные решения для роботов.
Рулетка — это замечательная конструкция, потому что она одновременно мягкая и жёсткая
— Грейвиш.
Захват включает два «пальца», которые выдвигаются из отдельных катушек. Каждая катушка из сдвоенных рулеточных полотен соответственно компактна, и лишь толика выступает треугольником, образуя «палец». Треугольные секции-«пальцы» управляются четырьмя двигателями. Каждый «палец» может двигаться независимо. Секции удлиняются, чтобы достигать нужных объектов и, при необходимости, приближать их.
У роботизированного захвата оказался широкий спектр применения, в том числе он годится, чтобы крутящими движениями открывать банки с металлическими крышками, менять электролампочки и пользоваться отвёртками.
Захват интересен тем, что использует всю длину ленты в качестве рабочей поверхности. Захват может удерживать широкий спектр предметов разной формы и жёсткости, от резинового мячика или одного помидора до целой грозди томатов. Поскольку сама лента может действовать как конвейерная, захват способен помещать удерживаемые объекты в контейнеры.
А поскольку лента гибкая, она также может огибать препятствия, с которыми столкнётся захват на пути к цели. Эксперименты показали, что манипулятор может легко собирать с веток достаточно крупные плоды, например, свежие лимоны.
Следующие версии изобретения хотят усовершенствовать до автономного устройства, добавив датчики и функцию анализа данных с помощью искусственного интеллекта.
- Дмитрий Ладыгин
- youtu.be/SP7X8TpNhmw; science.org
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Битва под Каневом: почему на 350 лет замолчали сокрушительную победу России?
Неудобная победа, предательство и идеология. Мы бы могли вообще не узнать об этом триумфе русского оружия...

Бомбы с орбиты: почему советская технология, воскрешенная Китаем, встревожила США?
Американцы слишком долго считали свои системы раннего предупреждения лучшими на планете. Теперь......

С Ноева ковчега сняли запрет: что покажут радары на Арарате?
История, которую больше всего высмеивали ученые, неожиданно становится все более реальной...

Дикий народ чучуна: Кто наводил ужас на коренное население Сибири?
Йети? Люди-изгои? Древнее племя? Пока что вопросов больше, чем ответов...

Почему их ДНК не меняется уже 42 000 лет: определен самый древний народ на планете
Три раза предки жителей Океании встречались с исчезнувшими видами людей, и это в корне изменило их гены...

Тайна «косого глаза» Венеры раскрыта: что увидела нейросеть на картинах Боттичелли?
Художник нарисовал пять портретов прекрасной Симонетты Веспуччи. И каждое полотно еще больше подтверждает страшный диагноз...

Мрачный прогноз для США из 1995 года сбылся: в чем великий ученый Саган оказался прав?
Исследователь говорил: все плохо, но еще не все потеряно. Его советы могут реально помочь всему человечеству...

Новая вселенная внутри звезды: почему Эйнштейн мог ошибаться насчет черных дыр
Больше 20 лет эта гипотеза в буквальном смысле раздирает мир науки. Но, возможно, именно она выведет ученых из тупика сингулярности...

Прорыв в астрономии: найти жизнь в космосе будет гораздо проще
Ученых не пугает даже погрешность в 20%. Зато будут просканированы тысячи планет...

Марс под вопросом: что может обнулить иммунитет у космонавтов?
И почему защита организма перестает видеть микробы, выжившие в космосе?...

43 — проклятый возраст Рюриковичей: почему многие князья не переживали этот роковой рубеж?
Генетики говорят: русская династия слишком поздно поняла, что попала в ловушку «чистой» крови...

Снегопады в Антарктиде становятся все аномальнее: и ученые, наконец-то, знают почему?
Ученым придется пересмотреть все климатические модели Шестого континента. Кстати, снега там будет выпадать с каждым годом все больше...

Доказана жизнь на спутнике Юпитера: как же бактериям удалось добраться с Земли на Европу?
За 3,5 миллиарда лет земные бактерии могли долететь до 105 звездных систем. Так что у Европы есть все шансы на «заражение»...

Сначала Стоунхендж был... не каменным: найден прототип легендарного святилища
Доисторическая религия оказалась старше на 500 лет, чем считали ученые. И она играла огромную роль в жизни древних людей...