
Прыгающий мини-робот преодолеет сложные рельефы и переместит грузы
Роботы размером с насекомых могут протиснуться, например, в разрушенное здание, чтобы искать раненых после катаклизмов. Однако, перемещаясь через завалы, крошечные ползуны столкнулись бы с чрезмерными препятствиями или с наклонными поверхностями, с которых легко соскользнуть.
Летающие роботы выше таких угроз, но затраты энергии для полёта весьма ограничивают дальность действий в завалах, прежде чем придётся вернуться на базу для подзарядки.
Чтобы сочетать преимущества обоих способов передвижения, учёные из Массачусетского технологического института (MIT) придумали и собрали робота-прыгуна, который может перескакивать через препятствия и перемещаться по склонам и бугристым поверхностям, расходуя гораздо меньше энергии, чем коллеги-летуны.
Прыгающий робот размером с мизинец и весом легче канцелярской скрепки снабжён пружинящей ножкой, которая подбрасывает его вверх, и четырьмя модулями с крыльями, которые придают подъёмную силу и управляют ориентацией.
Робот подпрыгивает примерно на 20 см, то есть вчетверо выше собственного роста, с боковой скоростью около 30 см в секунду, и без проблем передвигается по льду, мокрым поверхностям, неровной почве и даже… по движущемуся дрону. При этом прыгающий робот расходует примерно на 60% меньше энергии, чем его летающие подобия.
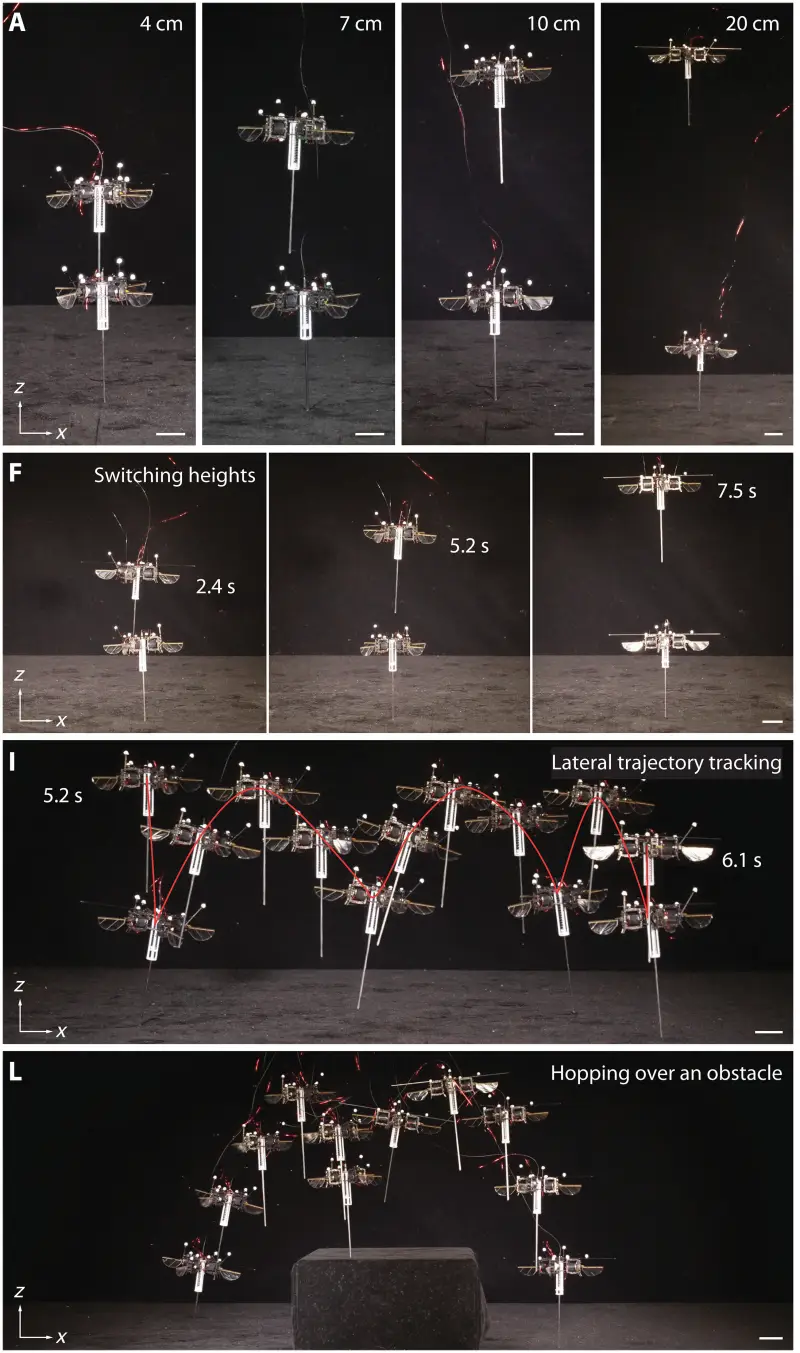 Каждый цикл прыжка состоит из короткой фазы опоры и длинной фазы полёта. Фаза полёта состоит из активного подъёма и контролируемого спуска с малой мощностью
Каждый цикл прыжка состоит из короткой фазы опоры и длинной фазы полёта. Фаза полёта состоит из активного подъёма и контролируемого спуска с малой мощностью
Благодаря лёгкости и прочности, а также энергоэффективности во время прыжков, робот может нести примерно вдесятеро больше полезной нагрузки, чем летун сходного размера, что открывает множество новых возможностей.
Аспирант MIT Йи-Сюань Сяо рассказал, что возможность разместить на борту прыгающего робота аккумуляторы, схемы и датчики стала гораздо более осуществимой, чем на летающем устройстве.
— Сяо.
Прыжки свойственны насекомым, от блох до кузнечиков. Хотя среди роботов-насекомых, которые обычно летают или ползают, прыжки встречаются реже, они дают много преимуществ с точки зрения энергоэффективности.
Когда робот подскакивает, он преобразует потенциальную энергию, которая возникает в воздухе, в кинетическую при снижении. Она же в свою очередь преобразуется обратно в потенциальную, когда он ударяется оземь, затем обратно в кинетическую при подъёме, и так далее, и тому подобное.
Чтобы предельно повысить эффективность, робота из MIT оснастили эластичной ногой, похожей, по сути, на пружинящую кнопку в авторучке. Нога преобразует скорость падения робота в скорость подъёма, когда он «топает» о землю.
Когда робот взмывает, крылья обеспечивают подъёмную силу, благодаря чему прыгун остаётся в вертикальном положении и принимает должную ориентацию для следующего прыжка. Четыре механизма крыльев активируются мягкими приводами типа искусственных мышц, которые достаточно прочны, чтобы выдерживать многократную тряску от столкновений с землёй.
— Сяо.
Ключевым фактором, влияющим на производительность, стал быстрый механизм управления прыгуном, который определяет, как следует ориентироваться для следующего прыжка. Процесс этот выполняется с помощью внешней системы отслеживания движений, а алгоритм наблюдения на основе показаний датчиков вычисляет необходимое для управления.
Когда робот прыгает, он чертит баллистическую дугу. На пике траектории программное обеспечение предсказывает, как пройдёт соприкосновение с твердью. Затем, исходя из целевой точки при снижении, контроллер рассчитывает наилучшую скорость взлёта для очередного рывка. В воздухе робот пускает в дело крылья, чтобы скорректировать положение и снизиться под правильным углом и при правильной оси, дабы двигаться в нужном направлении с оптимальной скоростью.
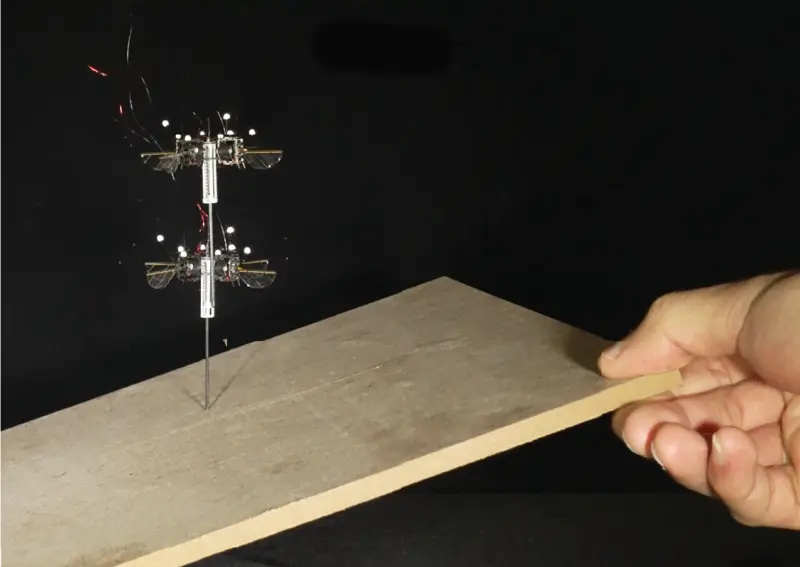
Крылатого прыгуна и его механизм управления испытали на различных поверхностях, включая траву, лёд, влажное стекло и неровную почву, — он успешно передвигался по всем твердям. Робот мог даже прыгать на поверхности, которая динамически наклонялась.
— Сяо.
Поскольку контроллер функционирует на разных поверхностях, робот способен легко переходить с одной на другую, не сбавляя темпа. Например, чтобы прыгать через траву, требуется больше усилий, чем чтобы перепрыгнуть через стекло, поскольку травинки гасят высоту прыжка. Но контроллер умеет подавать больше энергии на крылья робота во время фазы полёта, чтобы компенсировать это.
Благодаря миниатюрности и лёгковесности робот обладает меньшим моментом инерции, что делает его более манёвренным, чем устройства покрупнее, и более крепким при столкновениях. (Момент инерции — это физическая величина, которая характеризует распределение массы относительно оси вращения и определяет инерционные свойства во вращательном движении).
Исследователи продемонстрировали его ловкость, выполнив акробатические трюки. Сверхлёгкий робот, например, сумел благополучно запрыгнуть на летящий дрон.
В дальнейшем инженеры планируют использовать потенциал робота к перемещению тяжестей, установив на него аккумуляторы, датчики и другие схемы в надежде, что прыгун проявит автономность за пределами лаборатории.
Летающие роботы выше таких угроз, но затраты энергии для полёта весьма ограничивают дальность действий в завалах, прежде чем придётся вернуться на базу для подзарядки.
Чтобы сочетать преимущества обоих способов передвижения, учёные из Массачусетского технологического института (MIT) придумали и собрали робота-прыгуна, который может перескакивать через препятствия и перемещаться по склонам и бугристым поверхностям, расходуя гораздо меньше энергии, чем коллеги-летуны.
Прыгающий робот размером с мизинец и весом легче канцелярской скрепки снабжён пружинящей ножкой, которая подбрасывает его вверх, и четырьмя модулями с крыльями, которые придают подъёмную силу и управляют ориентацией.
Робот подпрыгивает примерно на 20 см, то есть вчетверо выше собственного роста, с боковой скоростью около 30 см в секунду, и без проблем передвигается по льду, мокрым поверхностям, неровной почве и даже… по движущемуся дрону. При этом прыгающий робот расходует примерно на 60% меньше энергии, чем его летающие подобия.
Каждый цикл прыжка состоит из короткой фазы опоры и длинной фазы полёта. Фаза полёта состоит из активного подъёма и контролируемого спуска с малой мощностьюБлагодаря лёгкости и прочности, а также энергоэффективности во время прыжков, робот может нести примерно вдесятеро больше полезной нагрузки, чем летун сходного размера, что открывает множество новых возможностей.
Аспирант MIT Йи-Сюань Сяо рассказал, что возможность разместить на борту прыгающего робота аккумуляторы, схемы и датчики стала гораздо более осуществимой, чем на летающем устройстве.
Надеемся, что однажды наш робот сможет выпрыгнуть из лаборатории и быть полезным в реальных условиях
— Сяо.
Прыжки свойственны насекомым, от блох до кузнечиков. Хотя среди роботов-насекомых, которые обычно летают или ползают, прыжки встречаются реже, они дают много преимуществ с точки зрения энергоэффективности.
Когда робот подскакивает, он преобразует потенциальную энергию, которая возникает в воздухе, в кинетическую при снижении. Она же в свою очередь преобразуется обратно в потенциальную, когда он ударяется оземь, затем обратно в кинетическую при подъёме, и так далее, и тому подобное.
Чтобы предельно повысить эффективность, робота из MIT оснастили эластичной ногой, похожей, по сути, на пружинящую кнопку в авторучке. Нога преобразует скорость падения робота в скорость подъёма, когда он «топает» о землю.
Когда робот взмывает, крылья обеспечивают подъёмную силу, благодаря чему прыгун остаётся в вертикальном положении и принимает должную ориентацию для следующего прыжка. Четыре механизма крыльев активируются мягкими приводами типа искусственных мышц, которые достаточно прочны, чтобы выдерживать многократную тряску от столкновений с землёй.
Мы тестировали одного и того же робота при всех испытаниях, и ремонт ни разу не потребовался
— Сяо.
Ключевым фактором, влияющим на производительность, стал быстрый механизм управления прыгуном, который определяет, как следует ориентироваться для следующего прыжка. Процесс этот выполняется с помощью внешней системы отслеживания движений, а алгоритм наблюдения на основе показаний датчиков вычисляет необходимое для управления.
Когда робот прыгает, он чертит баллистическую дугу. На пике траектории программное обеспечение предсказывает, как пройдёт соприкосновение с твердью. Затем, исходя из целевой точки при снижении, контроллер рассчитывает наилучшую скорость взлёта для очередного рывка. В воздухе робот пускает в дело крылья, чтобы скорректировать положение и снизиться под правильным углом и при правильной оси, дабы двигаться в нужном направлении с оптимальной скоростью.
Крылатого прыгуна и его механизм управления испытали на различных поверхностях, включая траву, лёд, влажное стекло и неровную почву, — он успешно передвигался по всем твердям. Робот мог даже прыгать на поверхности, которая динамически наклонялась.
Роботу на самом деле всё равно, под каким углом он приземляется. Если он не поскользнётся при ударе о землю, то всё будет в порядке
— Сяо.
Поскольку контроллер функционирует на разных поверхностях, робот способен легко переходить с одной на другую, не сбавляя темпа. Например, чтобы прыгать через траву, требуется больше усилий, чем чтобы перепрыгнуть через стекло, поскольку травинки гасят высоту прыжка. Но контроллер умеет подавать больше энергии на крылья робота во время фазы полёта, чтобы компенсировать это.
Благодаря миниатюрности и лёгковесности робот обладает меньшим моментом инерции, что делает его более манёвренным, чем устройства покрупнее, и более крепким при столкновениях. (Момент инерции — это физическая величина, которая характеризует распределение массы относительно оси вращения и определяет инерционные свойства во вращательном движении).
Исследователи продемонстрировали его ловкость, выполнив акробатические трюки. Сверхлёгкий робот, например, сумел благополучно запрыгнуть на летящий дрон.
В дальнейшем инженеры планируют использовать потенциал робота к перемещению тяжестей, установив на него аккумуляторы, датчики и другие схемы в надежде, что прыгун проявит автономность за пределами лаборатории.
- Дмитрий Ладыгин
- science.org
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Битва под Каневом: почему на 350 лет замолчали сокрушительную победу России?
Неудобная победа, предательство и идеология. Мы бы могли вообще не узнать об этом триумфе русского оружия...

Бомбы с орбиты: почему советская технология, воскрешенная Китаем, встревожила США?
Американцы слишком долго считали свои системы раннего предупреждения лучшими на планете. Теперь......

С Ноева ковчега сняли запрет: что покажут радары на Арарате?
История, которую больше всего высмеивали ученые, неожиданно становится все более реальной...

Дикий народ чучуна: Кто наводил ужас на коренное население Сибири?
Йети? Люди-изгои? Древнее племя? Пока что вопросов больше, чем ответов...

Почему их ДНК не меняется уже 42 000 лет: определен самый древний народ на планете
Три раза предки жителей Океании встречались с исчезнувшими видами людей, и это в корне изменило их гены...

Тайна «косого глаза» Венеры раскрыта: что увидела нейросеть на картинах Боттичелли?
Художник нарисовал пять портретов прекрасной Симонетты Веспуччи. И каждое полотно еще больше подтверждает страшный диагноз...

Мрачный прогноз для США из 1995 года сбылся: в чем великий ученый Саган оказался прав?
Исследователь говорил: все плохо, но еще не все потеряно. Его советы могут реально помочь всему человечеству...

Новая вселенная внутри звезды: почему Эйнштейн мог ошибаться насчет черных дыр
Больше 20 лет эта гипотеза в буквальном смысле раздирает мир науки. Но, возможно, именно она выведет ученых из тупика сингулярности...

Прорыв в астрономии: найти жизнь в космосе будет гораздо проще
Ученых не пугает даже погрешность в 20%. Зато будут просканированы тысячи планет...

Марс под вопросом: что может обнулить иммунитет у космонавтов?
И почему защита организма перестает видеть микробы, выжившие в космосе?...

43 — проклятый возраст Рюриковичей: почему многие князья не переживали этот роковой рубеж?
Генетики говорят: русская династия слишком поздно поняла, что попала в ловушку «чистой» крови...

Снегопады в Антарктиде становятся все аномальнее: и ученые, наконец-то, знают почему?
Ученым придется пересмотреть все климатические модели Шестого континента. Кстати, снега там будет выпадать с каждым годом все больше...

Доказана жизнь на спутнике Юпитера: как же бактериям удалось добраться с Земли на Европу?
За 3,5 миллиарда лет земные бактерии могли долететь до 105 звездных систем. Так что у Европы есть все шансы на «заражение»...

Сначала Стоунхендж был... не каменным: найден прототип легендарного святилища
Доисторическая религия оказалась старше на 500 лет, чем считали ученые. И она играла огромную роль в жизни древних людей...