
Смертоносное комбо: робот RAVEN получил всё лучшее от птиц, дронов и самолётов
Большинство уже известных дронов — это квадрокоптеры с винтами, которые успешно приземляются и взлетают практически в любом месте. Проблема в том, что их энергоэффективность ниже, чем у самолётов, которые гораздо дольше остаются в воздухе. Однако самолётам, чтобы оторваться от земли, необходима взлётно-посадочная полоса либо специальная пусковая установка.
Чтобы преодолеть эти ограничения и несовершенства, швейцарские исследователи из Федеральной политехнической школы Лозанны создали летающего робота с неподвижным крылом под названием RAVEN.
Название звучит и выглядит как английское слово «ворон», но заглавные буквы указывают на сокращение. Полное название Robotic Avian-inspired Vehicle for multiple ENvironments можно перевести как «вдохновлённый птицами роботизированный транспорт для различных сред». Вместо колёсных шасси — пара роботизированных лап. Главный инженер проекта Вон Дон Шин подчеркнул, что RAVEN может ходить, перепрыгивать через препятствия и взлетать, как настоящие птицы.
Против идеи приделать дронам лапы было два веских довода: рост массы и усложнение конструкции. Громоздкие и тяжёлые ноги современных роботов не подходили в принципе, так как задумывались для наземных устройств. Поэтому Шин с сотрудниками начали свой проект с изучения вопроса о массе ног у разных видов птиц.
Оказалось, что у пернатых соотношение массы нижних конечностей к их весу в целом пропорционально росту. (Кстати, понятие «птичьи лапы» не подразумевают всей нижней конечности, которая состоит у пернатых из пяти основных элементов, начиная от бедра и заканчивая пальцами, поэтому позволим себе здесь употреблять слово «ноги»). В общем, инженеры выяснили, что у ворона ноги весят около 100 г, что и взяли за точку отсчёта.
Роботизированные ноги, созданные группой Шина, очень похожи на настоящие птичьи. Для снижения веса пришлось пойти на упрощения: исключили суставы коленей и пальцев. В результате получилась конечность всего из двух сегментов, 64% веса которой пришлось на тазобедренный сустав.
Весь механизм приводит в движение носовой пропеллер, причём типичный, как у коптера. А вот голеностоп двигается с помощью системы шкивов и зубчатого ремня. Роботизированная нога заканчивается ступнёй с тремя пальцами, направленными вперёд, а один глядит назад.
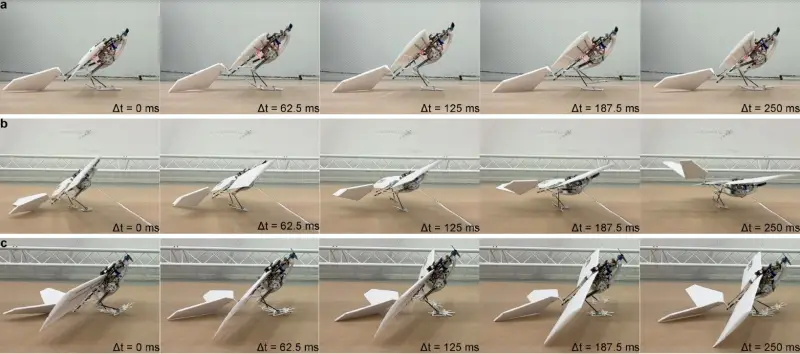
Сравнение ходьбы с различными конструкциями стоп: в окончательной версии, без отдельного заднего пальца и с фиксированными пальцами
Однако конструкторы не только упрощали строение. От птиц взяли идею сложных конструктивных особенностей.
Шин встроил торсионную (спиральную) пружину в голеностопный сустав. Сгибаясь, нога робота накапливает энергию в пружине, а при выпрямлении пружина в сочетании с двигателем повышает скорость прыжка на целую четверть.
— Шин.
В итоге роботизированные ноги весили около 230 г, намного больше, чем у среднестститического ворона. Но и этого хватило, чтобы RAVEN мог ходить, прыгать, подниматься в воздух и летать.
Инженеры рассчитали необходимую скорость взлёта для двух птиц — с массой тела 490 г и чуть более 780 г: 1,85 м и 3,21 м в секунду соответственно. Исходя из этого, Шин подсчитал, что роботу «Ворон» для взлёта необходима скорость 2,5 м/с. При манере взлёта, как у птиц, он мог бы достичь этой скорости всего за 0,17 с. Два других подхода включали сброс с возвышенности, по типу мотодельтаплана, либо отрыв от земли за счёт винтов, как у коптера.
Покадровая съёмка наземных движений «Ворона»
Под энергоэффективностью создатели понимали соотношение потребляемой и вырабатываемой энергии. Вырабатываемая энергия — это кинетическая и потенциальная энергия в момент взлёта, когда ноги перестают касаться земли. Потребляемая энергия рассчитывалась путём измерения мощности, используемой во время взлёта. В итоге выяснилось, что взлетать по-птичьи — выгоднее всего!
— Шин.
Затраты энергии при взлёте с помощью прыжка были немного выше, чем при использовании двух других стратегий, но несущественными образом. Для этого требовалось на 6,9% больше энергии, чем при взлёте со сбрасыванием вниз, и на 7,9% больше, чем при взлёте с места. Но в смысле затрат энергии «припрыжка» обеспечивала куда более высокое ускорение за счёт отдачи. В целом, прыжок с помощью «птичьих ног» был в 9,7 раз эффективнее, чем взлёт с места, и в 4,9 раза эффективнее, чем при полёте после сброса с возвышенности.
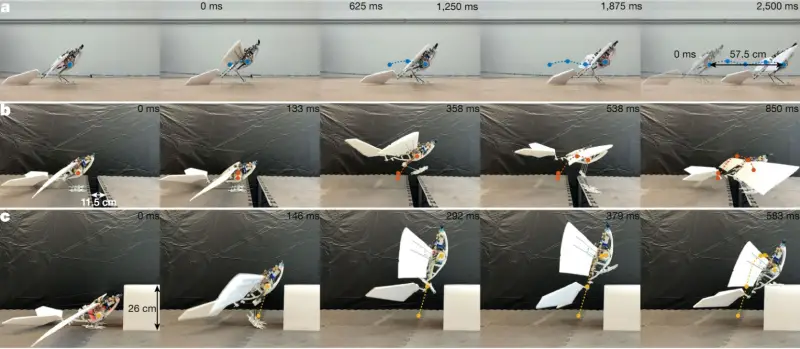
Чтобы доказать универсальность летающего робота с ногами, команда Шина поставила перед ним ряд задач, невыполнимых для типичного дрона. Так, RAVEN должен был пройти через помещение с низким потолком, перепрыгнуть через проём и заскочить на препятствие. В задранном положении, то есть касаясь хвостом земли, робот мог устойчиво ходить даже без контроллеров (устройств управления).
Ходьба решила проблему передвижения под низкими сводами. Для перепрыгивания через проёмы и препятствия пригодился тот же механизм, что и для взлёта: торсионные пружины и приводы. RAVEN мог перепрыгнуть через проём шириной 11 см и через препятствие высотой 26 см.
Но Шин признал, что потрудиться над «Вороном» предстоит ещё много, прежде чем новинка станет по-настоящему примечательной. Так, робот пока что не может преодолеть все препятствия за один раз — под каждую задачу его надо перепрограммировать по отдельности.
Проблема в том, что система управления ещё не адаптивна. Это означает, что приводы в ногах следуют заранее заданным алгоритмам движений, чтобы направить робота по траектории, которую инженеры рассчитали с помощью компьютерного моделирования. В общем, встретив на пути незапланированное препятствие, нынешний RAVEN в него врежется.
Другая проблема — RAVEN не может приземляться на ноги. Вот почему инженеры хотят встроить несколько датчиков, как для восприятия картинки, так и тактильные. Благодаря им «Ворон» будет в точности знать, где именно место посадки.
Ещё одна модификация, которая появится у несовершенной концепции — это складные крылья, чтобы робот мог протискиваться в узкие пространства. К тому же машущие крылья очень важны и для посадки, потому что птицы замедляют полёт в первую очередь за счёт них.
— Шин.
Разработчики утверждают, что готовят своё детище для участия в поисково-спасательных операциях. Идея состоит в том, что летающие роботы с ногами смогут быстро добираться до пострадавших от стихийных бедствий: приземляться, при необходимости преодолевать сложный рельеф пешком, а затем взлетать, как птицы.
Ещё одно возможное применение — доставка посылок. В Швейцарии инженеры часто видели, как вертолёты доставляют почту живущим высоко в горах. Дрон, похожий на птицу, мог бы делать это гораздо дешевле.
Успехи робототехники вызывают и восхищение, и тревогу. Причём пугающий аспект не зависит от создателей новинки. Когда «Ворон» будет уже близок к совершенству, купившие его сами будут решать, что доставлять — почту, еду или боеприпасы.
Чтобы преодолеть эти ограничения и несовершенства, швейцарские исследователи из Федеральной политехнической школы Лозанны создали летающего робота с неподвижным крылом под названием RAVEN.
Название звучит и выглядит как английское слово «ворон», но заглавные буквы указывают на сокращение. Полное название Robotic Avian-inspired Vehicle for multiple ENvironments можно перевести как «вдохновлённый птицами роботизированный транспорт для различных сред». Вместо колёсных шасси — пара роботизированных лап. Главный инженер проекта Вон Дон Шин подчеркнул, что RAVEN может ходить, перепрыгивать через препятствия и взлетать, как настоящие птицы.
Против идеи приделать дронам лапы было два веских довода: рост массы и усложнение конструкции. Громоздкие и тяжёлые ноги современных роботов не подходили в принципе, так как задумывались для наземных устройств. Поэтому Шин с сотрудниками начали свой проект с изучения вопроса о массе ног у разных видов птиц.
Оказалось, что у пернатых соотношение массы нижних конечностей к их весу в целом пропорционально росту. (Кстати, понятие «птичьи лапы» не подразумевают всей нижней конечности, которая состоит у пернатых из пяти основных элементов, начиная от бедра и заканчивая пальцами, поэтому позволим себе здесь употреблять слово «ноги»). В общем, инженеры выяснили, что у ворона ноги весят около 100 г, что и взяли за точку отсчёта.
Роботизированные ноги, созданные группой Шина, очень похожи на настоящие птичьи. Для снижения веса пришлось пойти на упрощения: исключили суставы коленей и пальцев. В результате получилась конечность всего из двух сегментов, 64% веса которой пришлось на тазобедренный сустав.
Весь механизм приводит в движение носовой пропеллер, причём типичный, как у коптера. А вот голеностоп двигается с помощью системы шкивов и зубчатого ремня. Роботизированная нога заканчивается ступнёй с тремя пальцами, направленными вперёд, а один глядит назад.
Сравнение ходьбы с различными конструкциями стоп: в окончательной версии, без отдельного заднего пальца и с фиксированными пальцами
Однако конструкторы не только упрощали строение. От птиц взяли идею сложных конструктивных особенностей.
Шин встроил торсионную (спиральную) пружину в голеностопный сустав. Сгибаясь, нога робота накапливает энергию в пружине, а при выпрямлении пружина в сочетании с двигателем повышает скорость прыжка на целую четверть.
Птицы могут накапливать энергию в своей мышечно-суставной системе во время сгибания и очень быстро высвобождать её во время разгибания для прыжка.
Задача пружины состояла в том, чтобы имитировать этот механизм, что и сработало, причём неплохо. На самом деле это увеличило скорость прыжка на 25 процентов
Задача пружины состояла в том, чтобы имитировать этот механизм, что и сработало, причём неплохо. На самом деле это увеличило скорость прыжка на 25 процентов
— Шин.
В итоге роботизированные ноги весили около 230 г, намного больше, чем у среднестститического ворона. Но и этого хватило, чтобы RAVEN мог ходить, прыгать, подниматься в воздух и летать.
Инженеры рассчитали необходимую скорость взлёта для двух птиц — с массой тела 490 г и чуть более 780 г: 1,85 м и 3,21 м в секунду соответственно. Исходя из этого, Шин подсчитал, что роботу «Ворон» для взлёта необходима скорость 2,5 м/с. При манере взлёта, как у птиц, он мог бы достичь этой скорости всего за 0,17 с. Два других подхода включали сброс с возвышенности, по типу мотодельтаплана, либо отрыв от земли за счёт винтов, как у коптера.
Покадровая съёмка наземных движений «Ворона»
Под энергоэффективностью создатели понимали соотношение потребляемой и вырабатываемой энергии. Вырабатываемая энергия — это кинетическая и потенциальная энергия в момент взлёта, когда ноги перестают касаться земли. Потребляемая энергия рассчитывалась путём измерения мощности, используемой во время взлёта. В итоге выяснилось, что взлетать по-птичьи — выгоднее всего!
Оказалось, что взлетать вприпрыжку — самая энергоэффективная стратегия. Это было довольно неожиданно
— Шин.
Затраты энергии при взлёте с помощью прыжка были немного выше, чем при использовании двух других стратегий, но несущественными образом. Для этого требовалось на 6,9% больше энергии, чем при взлёте со сбрасыванием вниз, и на 7,9% больше, чем при взлёте с места. Но в смысле затрат энергии «припрыжка» обеспечивала куда более высокое ускорение за счёт отдачи. В целом, прыжок с помощью «птичьих ног» был в 9,7 раз эффективнее, чем взлёт с места, и в 4,9 раза эффективнее, чем при полёте после сброса с возвышенности.
Чтобы доказать универсальность летающего робота с ногами, команда Шина поставила перед ним ряд задач, невыполнимых для типичного дрона. Так, RAVEN должен был пройти через помещение с низким потолком, перепрыгнуть через проём и заскочить на препятствие. В задранном положении, то есть касаясь хвостом земли, робот мог устойчиво ходить даже без контроллеров (устройств управления).
Ходьба решила проблему передвижения под низкими сводами. Для перепрыгивания через проёмы и препятствия пригодился тот же механизм, что и для взлёта: торсионные пружины и приводы. RAVEN мог перепрыгнуть через проём шириной 11 см и через препятствие высотой 26 см.
Но Шин признал, что потрудиться над «Вороном» предстоит ещё много, прежде чем новинка станет по-настоящему примечательной. Так, робот пока что не может преодолеть все препятствия за один раз — под каждую задачу его надо перепрограммировать по отдельности.
Проблема в том, что система управления ещё не адаптивна. Это означает, что приводы в ногах следуют заранее заданным алгоритмам движений, чтобы направить робота по траектории, которую инженеры рассчитали с помощью компьютерного моделирования. В общем, встретив на пути незапланированное препятствие, нынешний RAVEN в него врежется.
Другая проблема — RAVEN не может приземляться на ноги. Вот почему инженеры хотят встроить несколько датчиков, как для восприятия картинки, так и тактильные. Благодаря им «Ворон» будет в точности знать, где именно место посадки.
Ещё одна модификация, которая появится у несовершенной концепции — это складные крылья, чтобы робот мог протискиваться в узкие пространства. К тому же машущие крылья очень важны и для посадки, потому что птицы замедляют полёт в первую очередь за счёт них.
Когда RAVEN захлопает крыльями, это будет настоящий робот-птица
— Шин.
Разработчики утверждают, что готовят своё детище для участия в поисково-спасательных операциях. Идея состоит в том, что летающие роботы с ногами смогут быстро добираться до пострадавших от стихийных бедствий: приземляться, при необходимости преодолевать сложный рельеф пешком, а затем взлетать, как птицы.
Ещё одно возможное применение — доставка посылок. В Швейцарии инженеры часто видели, как вертолёты доставляют почту живущим высоко в горах. Дрон, похожий на птицу, мог бы делать это гораздо дешевле.
Успехи робототехники вызывают и восхищение, и тревогу. Причём пугающий аспект не зависит от создателей новинки. Когда «Ворон» будет уже близок к совершенству, купившие его сами будут решать, что доставлять — почту, еду или боеприпасы.
- Дмитрий Ладыгин
- nature.com
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Васюганские топи: что скрывает самое большое болото на планете?
И почему его называют вечно молодым? И кто прятался в самом сердце мрачных болот?...

Кипящая дыра в Йеллоустоуне: почему геологи «проморгали» опасный инцидент?
Геологический детектив: незамеченный взрыв, неожиданный провал и далеко идущие последствия...

Европа задыхается от жары: почему западные страны оказались не готовы к стремительному потеплению?
Эксперты говорят: с каждым годом будет все хуже и опаснее. Но выхода из ситуации пока нет...

Мы не единственные во Вселенной: ученые рассказали о «невозможных» видах разума
Сознание может быть у кого угодно. Но сможем ли мы узнать его при встрече?...

Проклятье 30 июня: почему в этот день произошло столько крупных катастроф?
Официально виновата погода, но изучение деталей до сих пор вызывает множество вопросов...

Тайна золотого вулкана: почему гора в Антарктике извергает драгоценный металл?
Ученые уже 30 лет пытаются разгадать этот природный детектив. Что удалось узнать исследователям...

Конец 30-летней легенды: Эверест может лишиться одного из главных символов
Эксперты предупреждают индийское правительство: экспедиция будет крайне опасной и вряд ли закончится успехом. Почему?...

Еще одна тайна майя: археологи секрет алтаря в заброшенном городе
Выяснилось, что индейцы долгие столетия продолжали исповедовать, казалось бы, давно забытый древний культ...

Снегопады в Антарктиде становятся все аномальнее: и ученые, наконец-то, знают почему?
Ученым придется пересмотреть все климатические модели Шестого континента. Кстати, снега там будет выпадать с каждым годом все больше...

Бельгийскую разведку снова взломали: хакеры целый год качали оттуда секретные данные
Эксперты говорят: проникновение было замечено совершенно случайно. И это пугает...

«День разоблачения»: какие реальные истории об НЛО легли в основу фильма Стивена Спилберга
Режиссер говорит, что шел к этой картине долгих 50 лет...

МКС осталось совсем недолго: NASA рассказало, когда произойдет ликвидация и что будет, если спуск пойдет не по плану?
Эксперты предупреждают: опаснее всего будет, когда станция снизится до 280 км. Почему?...

Доказана жизнь на спутнике Юпитера: как же бактериям удалось добраться с Земли на Европу?
За 3,5 миллиарда лет земные бактерии могли долететь до 105 звездных систем. Так что у Европы есть все шансы на «заражение»...

Сначала Стоунхендж был... не каменным: найден прототип легендарного святилища
Доисторическая религия оказалась старше на 500 лет, чем считали ученые. И она играла огромную роль в жизни древних людей...

Гигантские огненные вихри помогут ликвидировать разливы нефти
Новый метод поможет решить многие проблемы, но без ложки дегтя все-таки не обошлось...

Откуда на Луне вода? Тайну раскрыл новый эксперимент американских ученых
Почему новое открытие — это огромный шаг в сторону космической колонизации?...