
Большие языковые модели помогут роботам с навигацией в открытом мире
Современные роботы должны взаимодействовать с объектами и пользователями, постоянно анализируя окружающий мир и подстраиваясь под его изменения, а не придерживаясь заранее заданных команд. Последние исследования активно изучают такой подход как навигация объектов без предварительного обучения (ZSON).
ZSON включает в себя разработку методов, позволяющих роботам передвигаться по новой местности и взаимодействовать с ранее неизвестными объектами. Команда из Университета Мичигана решила улучшить этот подход, внедря большие языковые модели (LLM) для выполнения пользовательских команд.
Для решения этой задачи был создан фреймворк ORION, который использует LLM для взаимодействия роботов с окружающим миром. Этот фреймворк состоит из модулей управления, семантической карты, определения и запоминания объектов.
Исследователи тестировали свой подход как в симуляциях, так и в реальной жизни. Они обнаружили, что ORION эффективно использует обратную связь от пользователей для поиска конкретных объектов. Однако совмещение всех функций робота по-прежнему остается сложной задачей.
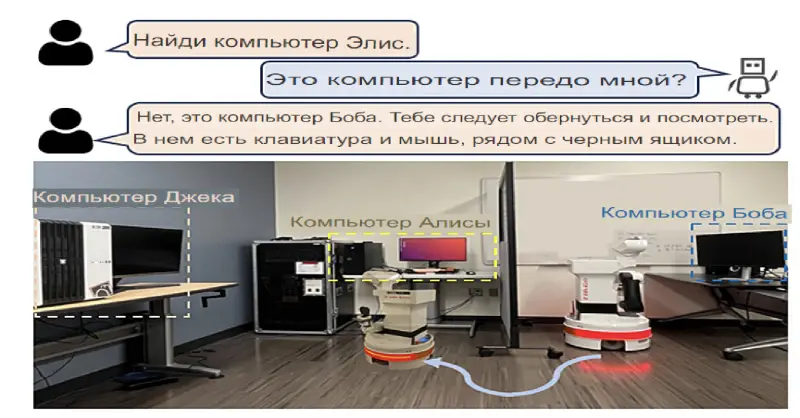
В комнате есть три компьютера, которые робот раньше никогда не видел. Общаясь с пользователем робот задаёт уточняющие вопросы для обнаружения нужного компьютера.
Несмотря на потенциал ORION в улучшении персонализированной навигации роботов в неизвестных условиях, команда столкнулась со сложностями в одновременном обеспечении выполнения миссий роботами вместе с плавной навигацией в неизвестных условиях и качественным взаимодействием с пользователями.
—Дай, Пенг, соавтор исследования.
Основное внимание в будущих исследованиях команды будет уделено дальнейшему совершенствованию ORION и изучению других методов, которые могут дополнить его. Также необходимо улучшение многомодульного взаимодействия роботов с пользователями и обеспечение более высокой степени адаптивности к неожиданным ситуациям.
Разработка таких систем навигации роботов имеет огромный потенциал не только для научных исследований, но и для реального применения в индустрии, где требуется высокая степень персонализации и адаптивности к изменяющимся условиям.
ZSON включает в себя разработку методов, позволяющих роботам передвигаться по новой местности и взаимодействовать с ранее неизвестными объектами. Команда из Университета Мичигана решила улучшить этот подход, внедря большие языковые модели (LLM) для выполнения пользовательских команд.
Для решения этой задачи был создан фреймворк ORION, который использует LLM для взаимодействия роботов с окружающим миром. Этот фреймворк состоит из модулей управления, семантической карты, определения и запоминания объектов.
Трудности при создании нового типа навигации
Исследователи тестировали свой подход как в симуляциях, так и в реальной жизни. Они обнаружили, что ORION эффективно использует обратную связь от пользователей для поиска конкретных объектов. Однако совмещение всех функций робота по-прежнему остается сложной задачей.
В комнате есть три компьютера, которые робот раньше никогда не видел. Общаясь с пользователем робот задаёт уточняющие вопросы для обнаружения нужного компьютера.
Несмотря на потенциал ORION в улучшении персонализированной навигации роботов в неизвестных условиях, команда столкнулась со сложностями в одновременном обеспечении выполнения миссий роботами вместе с плавной навигацией в неизвестных условиях и качественным взаимодействием с пользователями.
Эта работа — лишь первый шаг в изучении применения LLM в персонализированной навигации и имеет ряд ограничений. Например, не учитываются более широкие типы задач, такие как задачи на основе анализа изображений или многомодульное взаимодействие с пользователями в реальном мире. В наших будущих работах мы планируем углубиться в эти вопросы, чтобы повысить адаптивность и универсальность интерактивных роботов в человеческом мире
—Дай, Пенг, соавтор исследования.
Будущее разработки
Основное внимание в будущих исследованиях команды будет уделено дальнейшему совершенствованию ORION и изучению других методов, которые могут дополнить его. Также необходимо улучшение многомодульного взаимодействия роботов с пользователями и обеспечение более высокой степени адаптивности к неожиданным ситуациям.
Разработка таких систем навигации роботов имеет огромный потенциал не только для научных исследований, но и для реального применения в индустрии, где требуется высокая степень персонализации и адаптивности к изменяющимся условиям.
- Алексей Павлов
- Dai et al.
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Битва под Каневом: почему на 350 лет замолчали сокрушительную победу России?
Неудобная победа, предательство и идеология. Мы бы могли вообще не узнать об этом триумфе русского оружия...

Бомбы с орбиты: почему советская технология, воскрешенная Китаем, встревожила США?
Американцы слишком долго считали свои системы раннего предупреждения лучшими на планете. Теперь......

С Ноева ковчега сняли запрет: что покажут радары на Арарате?
История, которую больше всего высмеивали ученые, неожиданно становится все более реальной...

Дикий народ чучуна: Кто наводил ужас на коренное население Сибири?
Йети? Люди-изгои? Древнее племя? Пока что вопросов больше, чем ответов...

Почему их ДНК не меняется уже 42 000 лет: определен самый древний народ на планете
Три раза предки жителей Океании встречались с исчезнувшими видами людей, и это в корне изменило их гены...

Тайна «косого глаза» Венеры раскрыта: что увидела нейросеть на картинах Боттичелли?
Художник нарисовал пять портретов прекрасной Симонетты Веспуччи. И каждое полотно еще больше подтверждает страшный диагноз...

Мрачный прогноз для США из 1995 года сбылся: в чем великий ученый Саган оказался прав?
Исследователь говорил: все плохо, но еще не все потеряно. Его советы могут реально помочь всему человечеству...

Новая вселенная внутри звезды: почему Эйнштейн мог ошибаться насчет черных дыр
Больше 20 лет эта гипотеза в буквальном смысле раздирает мир науки. Но, возможно, именно она выведет ученых из тупика сингулярности...

Снегопады в Антарктиде становятся все аномальнее: и ученые, наконец-то, знают почему?
Ученым придется пересмотреть все климатические модели Шестого континента. Кстати, снега там будет выпадать с каждым годом все больше...

Прорыв в астрономии: найти жизнь в космосе будет гораздо проще
Ученых не пугает даже погрешность в 20%. Зато будут просканированы тысячи планет...

Тайный Еще одна тайна майя: археологи секрет алтаря в заброшенном городе
Выяснилось, что индейцы долгие столетия продолжали исповедовать, казалось бы, давно забытый древний культ...

Марс под вопросом: что может обнулить иммунитет у космонавтов?
И почему защита организма перестает видеть микробы, выжившие в космосе?...

43 — проклятый возраст Рюриковичей: почему многие князья не переживали этот роковой рубеж?
Генетики говорят: русская династия слишком поздно поняла, что попала в ловушку «чистой» крови...

Доказана жизнь на спутнике Юпитера: как же бактериям удалось добраться с Земли на Европу?
За 3,5 миллиарда лет земные бактерии могли долететь до 105 звездных систем. Так что у Европы есть все шансы на «заражение»...

Сначала Стоунхендж был... не каменным: найден прототип легендарного святилища
Доисторическая религия оказалась старше на 500 лет, чем считали ученые. И она играла огромную роль в жизни древних людей...

Бельгийскую разведку снова взломали: хакеры целый год качали оттуда секретные данные
Эксперты говорят: проникновение было замечено совершенно случайно. И это пугает...