
«Безмозглый» мягкий робот может ориентироваться в изменчивых условиях
Исследователи из Университета штата Северная Каролина ранее изобрели мягкого робота, который смог ориентироваться в простых лабиринтах без помощи человека или компьютера. Затем они развили свой успех, создав «безмозглого» мягкого робота, который может ориентироваться в более сложных и динамичных условиях. Статью под названием «Интеллектуальный автономный мягкий роботизированный беглец из лабиринта» опубликовали в журнале Science Advances («Научные Успехи»).
Один из авторов статьи — Цзе Инь, профессор механики и аэрокосмической инженерии. Он рассказал, их первый мягкий робот был способен преодолевать очень простую полосу препятствий, однако не мог развернуться, если ни с чем не сталкивался. С практической точки зрения это означало, что робот иногда мог застревать, дрыгаясь взад-вперёд между параллельными препятствиями.
И тогда учёные разработали нового мягкого робота, который способен самостоятельно поворачиваться, что позволяет ему пробираться через извилистые лабиринты и даже обходить движущиеся препятствия. И всё это делается с помощью физического интеллекта, а не руководствуясь компьютером.
Физический интеллект в робототехнике — это свойство подвижных объектов, активность которых определяется их устройством и материалами, а не управляется компьютером или путём вмешательства человека.
Как и в более ранней версии изобретения, новых мягких роботов изготовили из лентообразных жидкокристаллических эластомеров. Их помещали на поверхность с температурой не менее 55 градусов по Цельсию. В результате часть робота, соприкасающаяся с поверхностью, сжимается, а другая под воздействием воздуха — нет. Это вызывает качение, и чем теплее поверхность, тем быстрее катится робот.
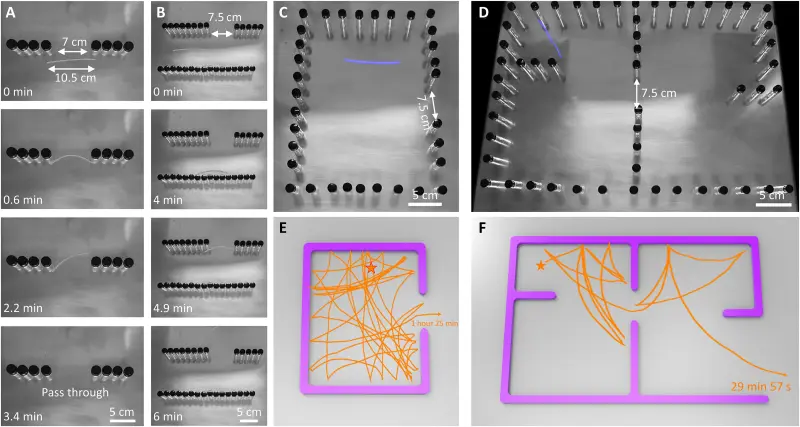
Предыдущая версия мягкого робота была симметрична. А новый состоит из двух разных половинок. Одна имеет форму скрученной верёвки, которая тянется по прямой линии. А другая — ещё более плотно скрученная верёвка с плетением наподобие винтовой лестницы.
Асимметричный дизайн означает, что один конец продолговатого робота воздействует на плоскость с большей силой, чем другой. Для сравнения подойдёт пластиковый стаканчик, горловина которого шире дна. Если катить его по столу, он движется не по прямой, а по дуге, пересекая стол благодаря асимметричной форме.
— Яо Чжао, первый автор статьи.
Исследователи продемонстрировали способность асимметричной мягкой конструкции перемещаться по более сложным лабиринтам, включая среду с движущимися стенами, и проходить через узкие пространства. Исследователи протестировали нового робота как на металлической поверхности, так и на песке. Видео асимметричного «безмозглого» устройства это доказывает.
Один из авторов статьи — Цзе Инь, профессор механики и аэрокосмической инженерии. Он рассказал, их первый мягкий робот был способен преодолевать очень простую полосу препятствий, однако не мог развернуться, если ни с чем не сталкивался. С практической точки зрения это означало, что робот иногда мог застревать, дрыгаясь взад-вперёд между параллельными препятствиями.
И тогда учёные разработали нового мягкого робота, который способен самостоятельно поворачиваться, что позволяет ему пробираться через извилистые лабиринты и даже обходить движущиеся препятствия. И всё это делается с помощью физического интеллекта, а не руководствуясь компьютером.
Физический интеллект в робототехнике — это свойство подвижных объектов, активность которых определяется их устройством и материалами, а не управляется компьютером или путём вмешательства человека.
Как и в более ранней версии изобретения, новых мягких роботов изготовили из лентообразных жидкокристаллических эластомеров. Их помещали на поверхность с температурой не менее 55 градусов по Цельсию. В результате часть робота, соприкасающаяся с поверхностью, сжимается, а другая под воздействием воздуха — нет. Это вызывает качение, и чем теплее поверхность, тем быстрее катится робот.
Предыдущая версия мягкого робота была симметрична. А новый состоит из двух разных половинок. Одна имеет форму скрученной верёвки, которая тянется по прямой линии. А другая — ещё более плотно скрученная верёвка с плетением наподобие винтовой лестницы.
Асимметричный дизайн означает, что один конец продолговатого робота воздействует на плоскость с большей силой, чем другой. Для сравнения подойдёт пластиковый стаканчик, горловина которого шире дна. Если катить его по столу, он движется не по прямой, а по дуге, пересекая стол благодаря асимметричной форме.
Концепция, лежащая в основе нашего нового робота, довольно проста: благодаря своей асимметричной конструкции он поворачивается без необходимости соприкасаться с объектами. И он меняет направление, когда касается объектов, что позволяет ему перемещаться по лабиринтам. Так что он не может застрять между параллельными объектами
— Яо Чжао, первый автор статьи.
Исследователи продемонстрировали способность асимметричной мягкой конструкции перемещаться по более сложным лабиринтам, включая среду с движущимися стенами, и проходить через узкие пространства. Исследователи протестировали нового робота как на металлической поверхности, так и на песке. Видео асимметричного «безмозглого» устройства это доказывает.
- Дмитрий Ладыгин
- science.org
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Конец 30-летней легенды: Эверест может лишиться одного из главных символов
Эксперты предупреждают индийское правительство: экспедиция будет крайне опасной и вряд ли закончится успехом. Почему?...

Феномен Великой Зеленой стены: за счет чего 66 миллиардов деревьев, высаженных Китаем, растут быстрее естественных лесов?
И почему ученые решили, что природные леса все-таки лучше рукотворных?...

Тайна золотого вулкана: почему гора в Антарктике извергает драгоценный металл?
Ученые уже 30 лет пытаются разгадать этот природный детектив. Что удалось узнать исследователям...

Тайну четырех черных яиц с 6000-метров глубины океана раскрыли японские ученые
Дно морей изучено гораздо хуже, чем поверхность Марса и Луны. Неудивительно, что исследователи постоянно делают открытия...

Проклятье 30 июня: почему в этот день произошло столько крупных катастроф?
Официально виновата погода, но изучение деталей до сих пор вызывает множество вопросов...

Секрет охоты на мамонтов открыт: ученые только что разрушили один из главных мифов древней истории
То, что наука считала исторической реконструкцией, оказалось обычным эпизодом из голливудского фильма...

Ученые «разжаловали» индонезийских хоббитов из умников: огнем не владели, подъедались за варанами
Что же заставило археологов переписать целый пласт древней истории?...

Аномальный дождь из рыбы: 150 лет ученые не могут объяснить эту тайну природы
Это явление официально считается неразгаданным феноменом и проходит в категории чудес и головной боли для науки...

Космический детектив: почему уникальную планету GJ 3378b никак не признают «второй Землей»?
Сами ученые призывают не торопиться с выводами, ведь истории с инопланетным объектом существует множество интересных нюансов...

316 лет на троих: ученые назвали три секрета феноменального долголетия сестер Нунес
Специалисты говорят: важно получить «хорошие гены», но еще важнее ими правильно распорядиться...

Серная кислота в небе: чем грозит пассажирам новый экологический проект?
Эксперты говорят: от этих планов вряд ли откажутся. Но есть ли у нас время, чтобы подготовиться?...