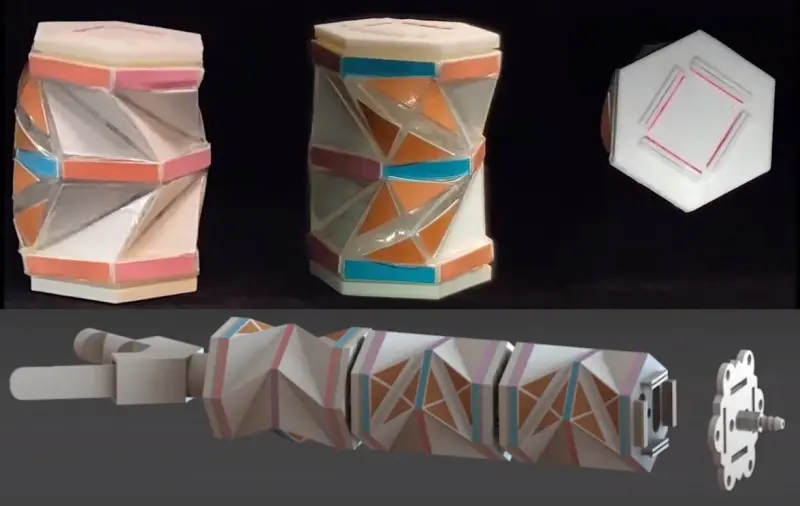
Исследовательская группа из двух университетов в Китае — Вестлейкского и Чжэцзянского — представила новый дизайн модульного робота, вдохновлённый оригами, то есть искусством складывания бумаги. Они использовали определённый повторяющийся элемент, известный как шаблон Креслинга. Концепция, представленная в издании Nature Communications, основана на универсальных складных модулях, из которых можно собирать различные формы и конфигурации.
Попытки использовать шаблон Креслинга для построения роботизированных манипуляторов были и прежде. Однако другие методы основаны исключительно на самом шаблоне Креслинга, то есть режимы деформации ограничены скручиванием и сжатием. Основная цель — модифицировать классический шаблон и задать новые режимы деформации
— Ханьцин Цзян, соавтор изобретения.
Шаблон Креслинга состоит из чередующихся выпуклых и впалых складок, чередующихся под углом вдоль противоположных направлений скручивания. Этот шаблон можно использовать для создания сложных форм, напоминающих творения природы, например геометрические спирали на сосновых шишках.
В ходе исследования Цзян с коллегами попытались использовать этот способ складывать оригами, который можно было бы адаптировать для создания различных форм. Модуль приводится в движение пневматикой на сжатом воздухе.
Цзян объяснил, что устройство состоит из двухуровневого рисунка Креслинга с противоположными направлениями скручивания на каждом уровне. Что ещё более важно, на каждом уровне есть два боковых мешка, давление в которых позволяет достигать различных режимов деформации.
В общей сложности в складном модуле возможны семь различных режимов активности для построенных на его базе роботов, включая три основных движения и четыре дополнительные их комбинации.
Модуль подобен рукам, которые могут сжиматься, разгибаться, скручивание в зависимости от того, как нервы управляют мышцами. Схема пневматики в устройстве подобна нервам, а универсальный модуль выполняет роль руки, объяснил Цзян. То есть манипулятор робота-оригами будет функционировать, как жёсткая рука с шестью степенями свободы.
Исследователи оценили возможности прототипа в серии компьютерных симуляций и путём реальных экспериментов. Собранные ими результаты оказались весьма многообещающими для создания роботов, которые могут адаптироваться к окружающей среде и двигаться различными способами.
В своих следующих работах Цзян с коллегами планируют наладить практическое применение, например для захвата крупных объектов.