Датчик улучшает тактильные способности роботов, позволяя им «ощущать» предметы и регулировать силу захвата. Достижение может быть важным шагом к созданию роботов, способных манипулировать и хватать объекты с человеческой ловкостью.
Прибор называется L3 F-TOUCH, где L3 означает легкий, недорогой и беспроводной. Датчик может измерять геометрию объекта и определять силы, необходимые для взаимодействия с ним. В отличие от других датчиков, которые оценивают силы взаимодействия по тактильной информации, полученной из изображений с камеры, L3 F-TOUCH измеряет силы взаимодействия напрямую, достигая более высокой точности измерения.
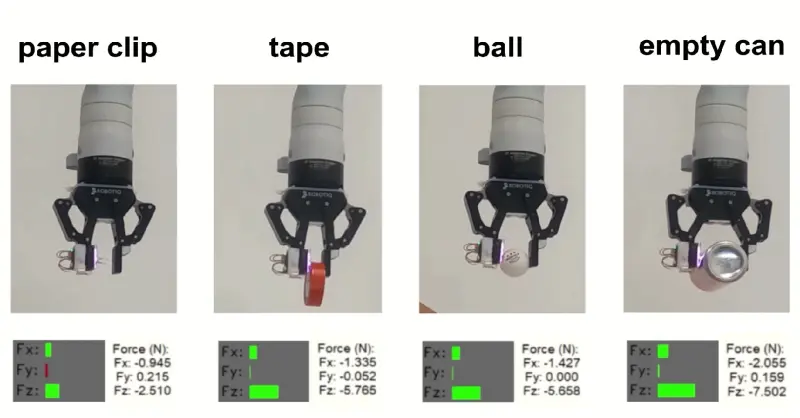
Датчик состоит из эластомера — резиноподобного материала, который деформируется при приложении внешней силы — и компактной подвесной конструкции, позволяющей эластомеру перемещаться при контакте. Для обработки этих данных перемещение эластомера отслеживается по движению специального маркера, называемого ARTag. Это позволяет измерять силы контакта вдоль трех основных осей (x, y и z) с помощью калибровочного процесса.
Исследование было проведено под руководством профессора Каспара Альтхофера из Университета Куин Мэри в Лондоне при участии коллег из Китая и США. Они опубликовали свои результаты в журнале IEEE Robotics and Automation Letters. Они также продемонстрировали работу датчика на видео, где роботизированная рука использует L3 F-TOUCH для хватания различных объектов, таких как яйцо, мяч и кубик.
Исследователи надеются, что их датчик поможет улучшить производительность и надежность роботизированных систем для различных применений, таких как промышленность, медицина и быт. Они также планируют развивать технологию и дальше, добавляя функции температурного и текстурного ощущения.
Датчик L3 F-TOUCH является результатом многолетнего исследования в области тактильного ощущения роботов, которое ведет профессор Альтхофер и его команда. Они также разработали другие датчики, такие как Tactip — гибкий датчик, имитирующий человеческий палец, и TacTip-Soft — мягкий датчик, который может адаптироваться к различным поверхностям. Такие решения также используют оптическое отслеживание для измерения сил и геометрии контакта.
Тактильное ощущение роботов — активная область исследований, которая ставит перед собой множество технических и научных вызовов. Их частью является и разработка подобных датчиков, способных обеспечить высокую чувствительность, надежность и интеграцию с роботизированными системами; интерпретировать и использовать тактильную информацию для управления роботами; понимать то, как человеческое тактильное ощущение работает и как его можно воспроизвести.
Тактильное ощущение роботов имеет большой потенциал для улучшения способности роботов взаимодействовать с окружающей средой и выполнять различные задачи. Например, тактильные датчики могут позволить роботам лучше захватывать и манипулировать хрупкими или скользкими объектами, такими как стекло, пластик или продукты питания; они могут также помочь роботам обнаруживать и избегать столкновений с людьми или другими роботами; а также они могут повысить безопасность и комфорт роботов, работающих в близком контакте с людьми, например, в медицине или социальной сфере.

Корейский натриевый аккумулятор наконец-то превзошёл царящие на рынке литий-ионные батареи
Исследователи разработали натриевую батарею со свойствами суперконденсаторов....








