Команда сосредоточилась на использовании мокриц и похожих по форме морских панцирных моллюсков, известных также как хитоны или полиплакофоры. Подопытные послужили в качестве функциональных захватов, прикреплённых к концам роботизированных рук. Концепция предполагает, что хватательный рефлекс мелкой живности послужит для удержания роботами объектов.
Методом 3D-печати для мокриц и моллюсков изготовили специальную «упряжь» из углеродных композитов. Таким образом биологическая составляющая могла взаимодействовать с объектами, свободно двигая конечностями. Этот метод выделяется среди прочих экспериментов гуманностью: живых существ не расчленяли и сохраняли им жизнь.
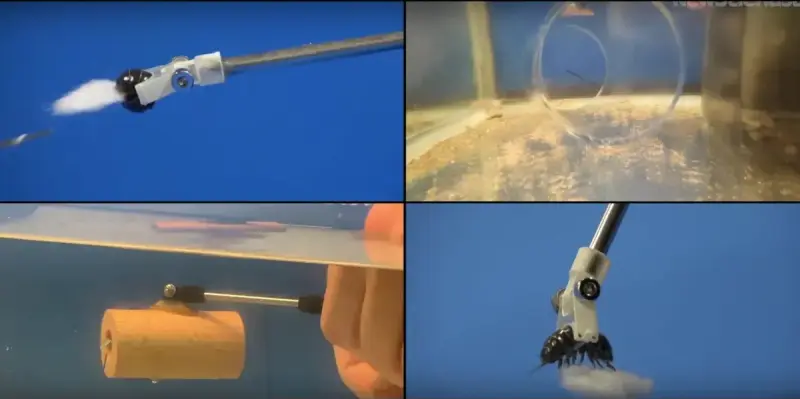
Учёные протестировали конечный эффектор с закреплённой мокрицей на кусочке ваты весом 0,03 грамма. И обнаружили, что мокрица успешно схватила и выпустила вату, а также могла вращать вату и удерживать её почти две минуты, прежде чем отпустить.
Что касается концевого эффектора с хитоном, то они протестировали его способность захватывать деревянные, пробковые и пластиковые цилиндры. И увидели, что хитон может захватывать предметы, но с трудом выпускает их под водой. Само по себе это отличается от обычных концевых насадок на присосках, которые не могут удерживать дерево и пробку.
В числе перспектив исследователи высоко оценивают:
• гекконов с микроструктурами на пальцах для хватания;
• осьминогов, кальмаров и лягушек с сильными присосками;
• морских огурцов для гибкого и жёсткого хватания;
• жгутики бактерий для микроскопических манипуляций.
• плотоядные растения венерианская мухоловка и австралийская росянка с их захватными свойствами.
В робототехнике конечный эффектор — это устройство на конце роботизированной руки, предназначенное для физического взаимодействия с объектами или самой окружающей средой. По сути, он служит рукой робота, выполняя задачи от имени людей. Новизна идеи японских учёных в том, что они перевернули эту концепцию с ног на голову и рассмотрели возможность использовать живые организмы целиком.