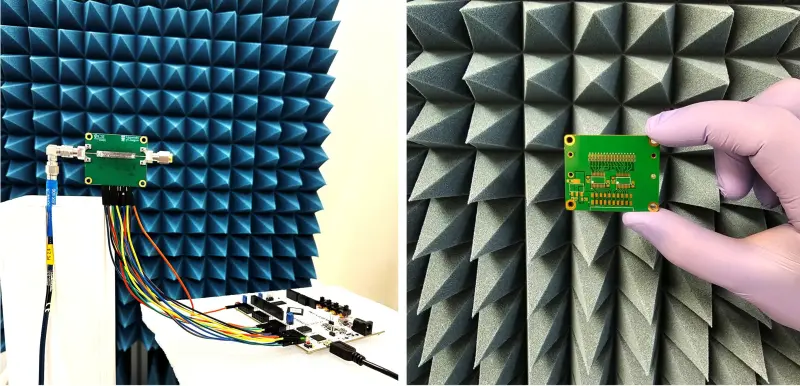
Исследователи из Университета Дунхуа в Китае недавно представили новую ионную кожу, которую можно использовать для имитации функции кончиков пальцев роботов. Это покрытие может позволить роботам ощущать тактильные свойства объектов и распознавать различные текстуры или материалы.
Изначально эта работа была вдохновлена кончиками пальцев и отпечатками пальцев, которые мы используем, чтобы осязать и воспринимать мир каждый день. Хотя в последние годы сообщалось о многочисленных «твердых» биомиметических кончиках пальцев, остаются две ключевые проблемы при разработке искусственной «мягкой» ионной кожи с тактильными возможностями, подобными кончикам пальцев
— доктор Шэнтонг Сан.
В рамках недавнего исследования доктор Сан и его коллеги решили преодолеть эти две проблемы, с которыми обычно сталкиваются при разработке мягких оболочек, состоящих из ионов, также известных как ионные оболочки. Для этого они сначала задумались о том, как формировать и характеризовать отпечатки пальцев на мягком материале, в конечном итоге имитируя как структуру, так и функцию кончиков пальцев человека.
Мы заметили, что кончики пальцев имеют модульно-контрастную структуру отпечатков пальцев с периодическими гребнями и впадинами. Считается, что такой эндогенный периодический паттерн создается неравновесным процессом реакции-диффузии из-за биохимического эффекта Тьюринга
— Шэнтонг Сан.
Когда кончики пальцев ощущают тактильные свойства объектов, к которым они прикасаются, предполагается, что жесткие гребни внутри них действуют как механические микрорычаги, которые могут быстро передавать тактильные вибрационные сигналы рецепторам в дерме (т. е. толстому слою ткани под наружным слоем кожи). Эти гребни лишь слегка деформируются при контакте с поверхностями или предметами, что позволяет сохранять с ними почти постоянный контакт. В результате чувствительность кончиков пальцев к давлению почти не подвержена деформационным искажениям.
Доктор Сан и его коллеги использовали стратегию формирования рисунка Лизеганга, которая влечет за собой реакцию осаждения для создания узоров в гидрогелевых материалах. Используя эту технику, они создали жесткие гребни, встроенные в эластичный гидрогель, напоминающие те, что наблюдаются на кончиках пальцев человека.
Структура Лизеганга обычно возникает, когда реакция осаждения сочетается с массовым переносом реагентов в пористой гелевой среде, что приводит к периодическим полосам преципитатов. Покрывая его слоем фторэластомера, ионная кожа с рисунком Лизеганга может действовать как высокочувствительный трибоэлектрический тактильный датчик. Благодаря контрасту модуля мягких впадин и жестких гребней, трибоэлектрический тактильный датчик может также чувствительно обнаруживать стимулы динамического давления, распознает тонкие текстуры и показывает почти неизменную чувствительность к давлению даже при растяжении до максимального напряжения разрушения (~ 50%) человеческой кожи
— Шэнтонг Сан.
В серии предварительных испытаний искусственный тактильный датчик, похожий на кожу, показал очень многообещающие результаты, воспринимая тактильную информацию, даже когда он был растянут.
В будущем искусственный тактильный датчик на основе гидрогеля может быть использован для создания мягкой кожи роботов или искусственных пальцев, которые могут получать сигналы динамического и статического давления в режиме реального времени, пока робот захватывает объекты.